Micromouse non è davvero come qualsiasi altro concorso di robotica come vedrei. È una specie di hobby che qualcuno può padroneggiare per tutta la sua vita. Partendo da zero, imparando dalle basi, c’è un lungo viaggio da scoprire. Tutti i grandi campioni delle competizioni internazionali di micromouse sono partiti dalle basi. Anche se vediamo i robot complessi costruire da loro ora, tutti hanno una storia di successo alle spalle.
Questo è il primo robot micromouse realizzato da “GreenYee” e dal suo team ; il campione micromouse di tutti i tempi negli Stati Uniti e il fondatore del sito web Micromouse USA. Non si tratta solo di fare tutto perfetto al primo tentativo, ma ciò che conta davvero è il miglioramento nel tempo.
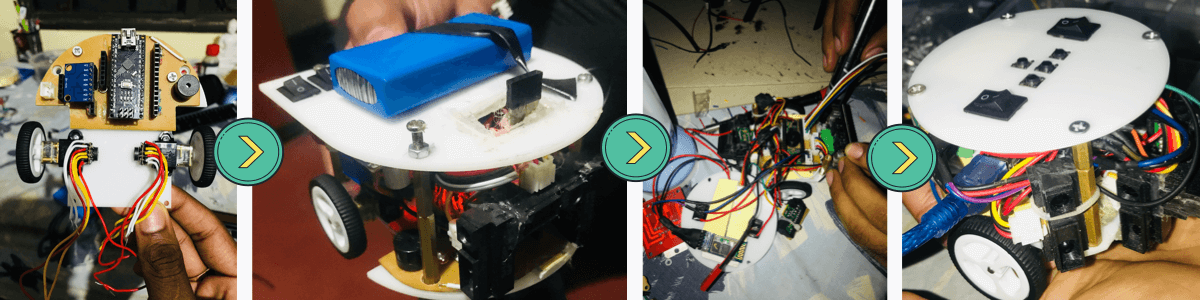
La serie di articoli di “getting started in the micromouse journey” è scritta con l’intenzione di condividere come il team “CircuitBreakers” ha iniziato il suo viaggio di micromouse. In questo particolare articolo, fornirò alcune informazioni sul nostro primo robot micromouse”වේග බට්ටා V1.0″.
Abbiamo iniziato a progettare il nostro primo robot micromouse nel 2018 per partecipare al livello universitario di “SLIIT Robofest 2018”. Dopo aver fatto la nostra ricerca iniziale sulla realizzazione di micromouse, abbiamo realizzato alcuni aspetti di base da coprire inizialmente.
- Trovare un buon hardware e costruire il robot
- Implementare e testare le funzioni di base del robot;
- Implementazione dell’algoritmo di riempimento
- Ottimizzazione e salvataggio del percorso più breve
Passiamo a ciascun aspetto in dettaglio.
Ecco l’elenco dei componenti che abbiamo utilizzato per progettare il nostro robot.
-
Pololu 1200rpm HPCB 6V dual shaft micro metal motors x 2-Questi motori sono piccoli e facili da controllare. Abbiamo dovuto usare la funzione pwm personalizzata per controllare questi motori perché erano troppo veloci. Per il V2.0 abbiamo utilizzato un numero di giri più lento dello stesso motore per un controllo più facile. (Collegamento)
-
Kit coppia encoder magnetico Pololu per micro metal gear motors – Questi encoder sono una buona soluzione per misurare la distanza percorsa dal robot. 12 Risoluzione CPR è ragionevole per misurare le distanze con precisione. (Collegamento)
-
Arduino Nano micro controller come MCU-Abbiamo scelto la piattaforma Arduino come un buon punto di partenza per fare un robot micromouse come eravamo giovani e inesperti in questo campo all’inizio. Considerando il fattore di forma più piccolo abbiamo scelto Arduino Nano come nostra soluzione. (Collegamento)
-
Dual MC33926 Driver del motore Carrier-Avevo acquistato questo driver del motore in precedenza. Pertanto, ho usato questo per il robot micromouse. Qualsiasi buona qualità, regolatore del motore a bassa potenza può essere utilizzato. Ma essere consapevoli quando si utilizza bassa qualità L29xx controller del motore come la reattività del robot potrebbe essere influenzato da esso. (Collegamento)
-
Modulo MPU6050 – Si tratta di un giroscopio gamma entry che sarà suite per i tipi di tutte le applicazioni di robotica. Oltre ad essere molto conveniente, questo giroscopio ha alcune caratteristiche molto uniche che mancano altri moduli a prezzi più elevati che ho intenzione di coprire in un altro articolo in futuro. (Collegamento)
-
Sharp IR sensori di distanza-Questi sensori in grado di fornire accurate misure di distanza anche la superficie è angolato e non sono influenzati dall’ambiente, oggetto di colore o di superficie.
a. 4-30 cm Sensore di distanza-Questi sensori sono stati utilizzati per misurare la distanza alle pareti di fronte e allineare il robot correttamente prima di una svolta (Link)
b. 2-15 cm Sensore di distanza-Questi sensori sono stati utilizzati per misurare la distanza alle pareti e allineare il robot parallelo alle pareti del labirinto (Link)
-
5 V Buzzer-Questo è venuto in utile come un segnale di debug in cui abbiamo usato come un feedback uditivo per testare il robot. Poiché Arduino Nano ha una memoria più piccola, non siamo stati in grado di collegare un display OLED per un feedback visivo, quindi l’utilizzo di un buzzer era un’alternativa.
-
Button Panel-Questo consiste di 3 pulsanti programmabili + pulsante di reset del MCU. Questo pannello pulsante ha permesso di includere diversi programmi di test al robot per controllare tutte le funzioni di base senza caricare diversi programmi.
-
1200 mAh 7.4 V batteria agli ioni di litio-Utilizzando 7.4 v batteria, produzione di 5 v e 6 v per i sensori e motori può essere fatto facilmente utilizzando step down convertitori.
-
Convertitori step down-Due convertitori step down separati sono stati utilizzati per fornire 5V per l’MCU e i sensori, 6V per il driver del motore.
LM2596 Modulo-6 V passo imbottiture convertitore
b. Mini DC 5 v 360 Buck Convetor – 5 v passo imbottiture convertitore
-
Modulo Bluetooth HC-05 – Per testare l’algoritmo floodfill, abbiamo utilizzato un modulo Bluetooth in cui possiamo inviare informazioni a un telefono cellulare o laptop.
-
Pololu ruote 32x7mm Coppia-abbiamo usato queste piccole ruote per suite il piccolo fattore di forma del nostro robot. ruote più piccole danno molto più controllo sulla velocità. (Collegamento)
Abbiamo iniziato con un design 10x10cm^2 e siamo passati a un design circolare 8x8cm^2 dove abbiamo posizionato i motori al centro del robot per facilitare la rotazione del robot senza cambiare l’asse di rotazione.
Ci sono un sacco di discutere quando si tratta di testare e programmare un robot micromouse. Pertanto, il resto delle fasi sarà discusso nei futuri articoli di questa serie con l’introduzione del nostro prossimo robot “XT V2.0” in 2019.
Ecco un video del nostro robot che si esibisce alle finali del concorso “SLIIT Robofest 2018”. Spero che hai imparato qualcosa dal mio primo articolo nella serie di articoli di “Getting started in the micromouse journey”.
Tieni sempre a mente di essere unico, iniziare lentamente e crescere con il tempo!
Si prega di aggiungere i vostri suggerimenti e domande di seguito per migliorare i miei articoli futuri. Buona fortuna fare il vostro primo robot micromouse. Grazie!