Micromouse ei oikeastaan ole mikään muu robotiikkakilpailu, kuten näkisin. Se on sellainen harrastus, että joku voi hallita koko elämänsä. Alusta alkaen, perusasioista oppimisessa, on pitkä matka löydettävänä. Kaikki suuret mestarit kansainvälisissä mikromoottorikilpailuissa ovat lähteneet liikkeelle aivan perusasioista. Vaikka näemme niiden rakentamat monimutkaiset robotit nyt, niillä kaikilla on takanaan menestystarina.
tämä on ensimmäinen ”Greenyeen” ja hänen tiiminsä valmistama micromouse-robotti ; USA: n kaikkien aikojen micromouse-mestari ja Micromouse USA-verkkosivuston perustaja. Tärkeintä ei ole tehdä kaikkea täydellistä ensimmäisellä yrityksellä, vaan tärkeintä on ajan myötä tapahtunut parannus.
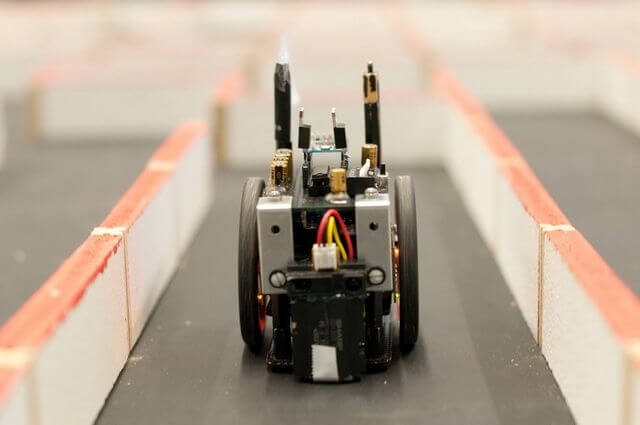
artikkelisarja ”getting started in the micromouse journey” on kirjoitettu tarkoituksenaan kertoa, miten team ”CircuitBreakers” aloitti micromouse-matkansa. Tässä artikkelissa, aion antaa joitakin tietoja meidän ensimmäinen micromouse robotti ”වේග බට්ටා v1.0”.
aloitimme ensimmäisen micromouse-robottimme suunnittelun jo vuonna 2018 osallistuaksemme ”SLIIT Robofest 2018” – perustutkintotasolle. Kun teimme alustavan tutkimuksen micromousen tekemisestä, olemme ymmärtäneet joitakin perusnäkökohtia, jotka katetaan aluksi.
- hyvän laitteiston löytäminen ja robotin rakentaminen
- toteuta ja testaa robotin perustoimintoja; sorvaus, liikkuvat solut ja etc
- Implementing flood fill algorithm
- viritys ja lyhimmän polun säästäminen
siirrytään jokaiseen seikkaan yksityiskohtaisesti.
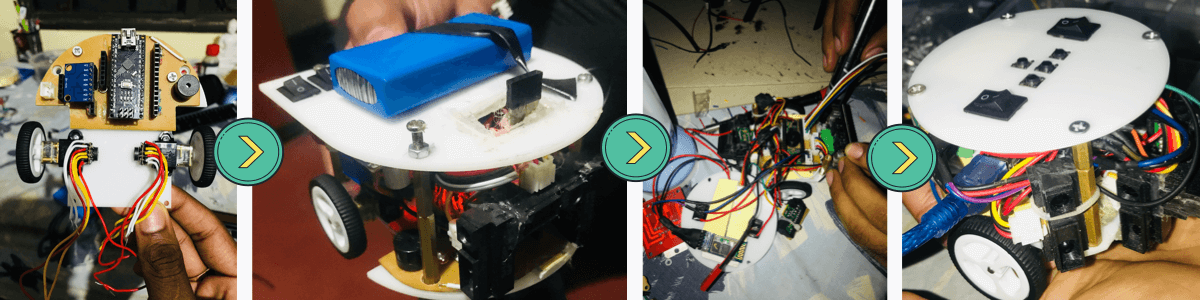
tässä on lista komponenteista, joita olemme käyttäneet robotin suunnittelussa.
-
Pololu 1200RPM HPCB 6V kaksiakseliset mikrometallimoottorit x 2-nämä moottorit ovat pieniä ja helppoja ohjata. Jouduimme käyttämään mukautettua PWM-toimintoa ohjataksemme näitä moottoreita, koska ne olivat liian nopeita. V2.0: ssa on käytetty saman moottorin hitaampaa kierroslukua helpottamaan ohjaamista. (Linkki)
-
Pololu magnetic encoder paripari mikrometallivaihteisiin moottoreihin – nämä anturit ovat hyvä ratkaisu robotin kulkeman etäisyyden mittaamiseen. 12 ELVYTYSTARKKUUS on kohtuullinen, jotta etäisyydet voidaan mitata tarkasti. (Linkki)
-
Arduino Nano micro controller kuin MCU-valitsimme Arduino alustan hyvä lähtökohta tehdä micromouse robotti olimme nuoria ja kokemattomia tällä alalla alussa. Ottaen huomioon pienempi muoto tekijä valitsimme Arduino Nano ratkaisuksi. (Linkki)
-
Dual MC33926 Motor Driver Carrier-olin ostanut tämän motor driver aiemmin. Siksi käytin tätä mikromuseorobottiin. Kaikkia hyvälaatuisia, pienitehoisia moottoriohjaimia voidaan käyttää. Mutta ole tietoinen, kun käytät heikkolaatuisia l29xx-moottoriohjaimia, koska se saattaa vaikuttaa robotin reagointikykyyn. (Linkki)
-
MPU6050 moduuli-tämä on merkintä alue gyroskooppi, joka sopii tyypit kaikki robotiikan sovelluksia. Sen lisäksi, että tämä gyro on erittäin kustannustehokas, sillä on joitakin hyvin ainutlaatuisia ominaisuuksia, joita muilla kalliimmilla moduuleilla ei ole, jotka aion kattaa toisessa artikkelissa tulevaisuudessa. (Linkki)
-
terävät ir-etäisyysanturit – nämä anturit voivat antaa tarkkoja etäisyysmittauksia, vaikka pinta on kulmikas eikä ympäristö, kohteen väri tai pinta vaikuta siihen.
A.4 – 30cm etäisyysanturi-näitä antureita käytettiin mittaamaan etäisyyttä edessä oleviin seiniin ja kohdistamaan robotti oikein ennen käännöstä (linkki)
b. 2-15cm etäisyysanturi – näitä antureita käytettiin mittaamaan etäisyyttä seiniin ja kohdistamaan robotti samansuuntaiseksi sokkelon seiniin (linkki)
-
5V summeri-tämä tuli kätevä virheenkorjaus signaali, jossa käytimme auditiivinen palaute testaamiseen robotti. Koska Arduino nanossa on pienempi muisti, emme pystyneet yhdistämään OLED-näyttöä visuaaliseen palautteeseen, joten Summerin käyttäminen oli vaihtoehto.
-
Button Panel – tämä koostuu 3 ohjelmoitavat painikkeet + reset-painiketta MCU. Tämä nappipaneeli on mahdollistanut useiden testiohjelmien sisällyttämisen robottiin kaikkien perustoimintojen tarkistamiseksi ilman useiden ohjelmien lataamista.
-
1200mAh 7.4 V litiumioniakku-7.4 v akku, tuottaa 5V ja 6v antureille ja Moottoreille voidaan helposti tehdä käyttämällä step down-muuntimia.
-
Step down-muuntimet – kaksi erillistä step down-muuntajaa antoivat 5V MCU: lle ja anturit, 6V moottorinkuljettajalle.
a. LM2596 Module-6V step down Converter
b. Mini DC 5V 360 Buck Convetor-5v askel alas muunnin
-
HC – 05 Bluetooth Module-valaistusalgoritmin testaamiseen olemme käyttäneet Bluetooth-moduulia, josta voimme lähettää tietoja matkapuhelimeen tai kannettavaan tietokoneeseen.
-
Pololu wheels 32x7mm pari-käytimme näitä pieniä pyöriä robotin pieneen muotoon. pienemmät pyörät antavat paljon enemmän kontrollia nopeuteen. (Linkki)
olemme aloittaneet 10x10cm^2-mallilla ja siirtyneet pyöreään 8x8cm^2-malliin, jossa sijoitimme moottorit robotin keskelle helpottamaan robotin kääntämistä muuttamatta kääntöakselia.
on paljon keskusteltavaa, kun se tulee testaus ja ohjelmointi micromouse robotti. Siksi loput vaiheet käsitellään tulevissa artikkeleissa tässä sarjassa ottamalla käyttöön seuraavan robottimme ”වේග බට්ටා v2. 0” vuonna 2019.
tässä video robotistamme esiintymässä ”slit Robofest 2018” – kilpailun finaalissa. Toivottavasti opit jotain ensimmäisestä artikkelistani artikkelisarjassa ”Getting started in the micromouse journey”.
muista aina olla ainutlaatuinen, aloittaa hitaasti ja kasvaa ajan kanssa!
lisää alla olevat ehdotuksesi ja kysymyksesi parantaaksesi tulevia artikkeleitani. Onnea ensimmäisen mikromökkirobotin tekemiseen. Kiitoksia!