Micromouse není jako žádná jiná robotická soutěž, jak bych viděl. Je to takový koníček, který může někdo zvládnout po celý život. Počínaje od základů, učit se od základů, je tu dlouhá cesta k objevení. Všichni velcí šampioni v mezinárodních mikromyšlenkových soutěžích začali od samých základů. I když nyní vidíme složité roboty, které staví, všichni mají za sebou úspěšný příběh.
Jedná se o první micromouse robot vyrobený „GreenYee“ a jeho týmem; all-time micromouse champion v USA a zakladatel Micromouse USA webové stránky. Není to všechno o tom, dělat všechno perfektní na první pokus, ale na čem opravdu záleží, je zlepšení v průběhu času.
článek série „Začínáme v micromouse journey“ je napsán se záměrem sdílet, jak tým „CircuitBreakers“ začal svou cestu micromouse. V tomto konkrétním článku poskytnu nějaký pohled na našeho prvního robota micromouse“v1 v1.0″.
začali jsme navrhovat našeho prvního robota micromouse již v roce 2018, abychom se zúčastnili vysokoškolské úrovně „SLIIT Robofest 2018“. Poté, co jsme provedli náš počáteční výzkum výroby micromouse, uvědomili jsme si některé základní aspekty, které je třeba zpočátku pokrýt.
- nalezení dobrého hardwaru a sestavení robota
- implementujte a otestujte základní funkce robota;
- implementace algoritmu výplně záplav
- ladění a uložení nejkratší cesty
pojďme se podrobně přesunout ke každému aspektu.
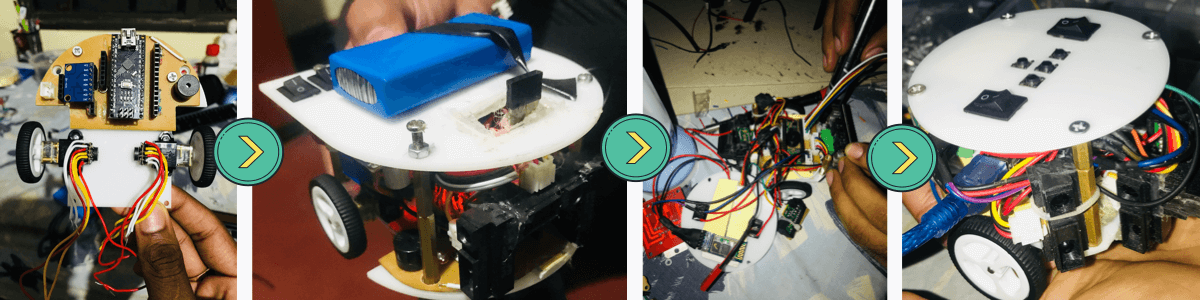
zde je seznam komponent, které jsme použili k návrhu našeho robota.
-
Pololu 1200rpm HPCB 6V dual shaft micro metal motors x 2-tyto motory jsou malé a snadno ovladatelné. K ovládání těchto motorů jsme museli použít vlastní funkci pwm, protože byly příliš rychlé. Pro V2. 0 jsme použili pomalejší otáčky stejného motoru pro snadnější ovládání. (Odkaz)
-
Pololu magnetic encoder pair kit pro micro metal gear motors – tyto enkodéry jsou dobrým řešením pro měření vzdálenosti ujeté robotem. 12 rozlišení CPR je rozumné přesně měřit vzdálenosti. (Odkaz)
-
Arduino Nano micro controller jako MCU – vybrali jsme platformu Arduino jako dobrý výchozí bod pro výrobu robota micromouse, protože jsme byli na začátku mladí a nezkušení v této oblasti. Vzhledem k menšímu tvarovému faktoru jsme zvolili Arduino Nano jako naše řešení. (Odkaz)
-
Dual MC33926 Motor Driver Carrier – koupil jsem tento ovladač motoru dříve. Proto jsem to použil pro robota micromouse. Lze použít jakýkoli kvalitní regulátor motoru s nízkým výkonem. Při použití nízkokvalitních regulátorů motoru L29xx však mějte na paměti, že reakce robota může být ovlivněna. (Odkaz)
-
MPU6050 Module-jedná se o vstupní rozsah gyroskop, který bude suite pro typy všech robotických aplikací. Kromě toho, že je velmi nákladově efektivní, má tento gyroskop některé velmi jedinečné vlastnosti, které postrádají jiné moduly s vyšší cenou, které plánuji v budoucnu pokrýt v jiném článku. (Odkaz)
-
ostré IR senzory vzdálenosti – tyto senzory mohou poskytovat přesné měření vzdálenosti, i když je povrch šikmý a není ovlivněn prostředím, barvou objektu nebo povrchem.
a. 4-30cm senzor vzdálenosti-tyto senzory byly použity pro měření vzdálenosti ke stěnám vpředu a správné zarovnání robota před zatáčkou (spojkou)
b. 2 – 15cm senzor vzdálenosti-tyto senzory byly použity k měření vzdálenosti ke stěnám a zarovnání robota rovnoběžně se stěnami bludiště (Link)
-
5V bzučák-to se hodilo jako ladicí signál, kde jsme použili jako sluchovou zpětnou vazbu pro testování robota. Protože Arduino Nano má menší paměť, nebyli jsme schopni připojit OLED displej pro vizuální zpětnou vazbu, proto bylo alternativou použití bzučáku.
-
panel tlačítek-skládá se ze 3 programovatelných tlačítek + resetovacího tlačítka MCU. Tento panel tlačítek umožnil zahrnout do robota několik testovacích programů pro kontrolu všech základních funkcí bez nahrání několika programů.
-
1200mAh 7.4 V lithium-iontová baterie-Použití 7.4 V baterie, produkující 5v a 6v pro senzory a motory lze snadno provést pomocí sestupných převodníků.
-
Step down convertors-dva samostatné step down convertors byly použity k zajištění 5V pro MCU a senzory, 6V pro řidiče motoru.
a. LM2596 modul – 6V krok dolů konvertor
b. Mini DC 5v 360 Buck Convetor-5v krok dolů konvertor
-
HC-05 Bluetooth Module-pro testování algoritmu floodfill jsme použili modul Bluetooth, kde můžeme posílat informace na mobilní telefon nebo notebook.
-
Pololu wheels 32x7mm Pair-použili jsme tato malá kola k vybavení malého tvarového faktoru našeho robota. menší kola dávají mnohem větší kontrolu nad rychlostí. (Odkaz)
nejprve jsme začali s designem 10x10cm^2 a přesunuli jsme se na kruhový design 8x8cm^2, kde jsme umístili motory uprostřed robota pro snadnější otáčení robota bez změny osy otáčení.
pokud jde o testování a programování robota micromouse, je třeba hodně diskutovat. Proto budou ostatní fáze diskutovány v budoucích článcích v této sérii se zavedením našeho dalšího robota „v2 v2. 0“ v roce 2019.
zde je video našeho robota vystupujícího na finále soutěže „SLIIT Robofest 2018“. Doufám, že jste se něco naučili z mého prvního článku v sérii článků „Začínáme v mikromouse journey“.
Vždy mějte na paměti, že je jedinečný, začít pomalu a růst s časem!
prosím, přidejte své návrhy a dotazy níže, abyste vylepšili své budoucí články. Hodně štěstí při vytváření prvního robota micromouse. Děkuji!