a Micromouse nem igazán olyan, mint bármely más robotikai verseny, ahogy látnám. Ez egyfajta hobbi, amelyet valaki egész életében elsajátíthat. Az alapoktól kezdve, az alapoktól tanulva, hosszú utat kell felfedezni. A nemzetközi micromouse versenyek minden nagy bajnoka az alapoktól kezdődött. Annak ellenére, hogy látjuk az általuk épített komplex robotokat, mindannyian mögöttük van egy sikertörténet.
ez az első micromouse robot, amelyet “GreenYee” és csapata készített ; az USA Minden idők micromouse bajnoka és a Micromouse USA weboldal alapítója. Nem arról van szó, hogy az első próbálkozáskor mindent tökéletesen csinálunk, de ami igazán számít, az az idő múlásával történő javulás.
az “első lépések a micromouse utazásban” cikksorozatot azzal a szándékkal írták, hogy megosszák, hogyan kezdte meg a “CircuitBreakers” csapat a micromouse utazását. Ebben a cikkben, azt nyújt némi betekintést az első micromouse robot”6.0″.
2018-ban kezdtük el tervezni első mikroméretű robotunkat, hogy részt vegyünk a “SLIIT Robofest 2018″egyetemi szintjén. Miután elvégeztük a micromouse készítésével kapcsolatos kezdeti kutatásunkat, rájöttünk néhány alapvető szempontra, amelyeket kezdetben le kell fedni.
- jó hardver megtalálása és a robot felépítése
- alapvető robotfunkciók végrehajtása és tesztelése;
- Flood fill algoritmus végrehajtása
- a legrövidebb út hangolása és mentése
lépjünk az egyes szempontokra részletesen.
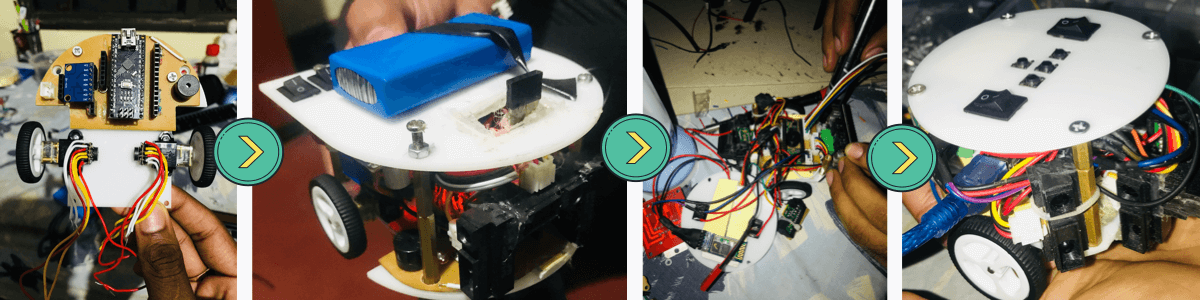
itt található a robotunk tervezéséhez használt alkatrészek listája.
-
Pololu 1200rpm HPCB 6V kettős tengelyű mikro fémmotorok x 2-Ezek a motorok kicsiek és könnyen kezelhetők. Egyedi PWM funkciót kellett használnunk ezeknek a motoroknak a vezérléséhez, mert túl gyorsak voltak. A V2.0 esetében ugyanazon motor lassabb fordulatszámát használtuk a könnyebb vezérlés érdekében. (Link)
-
Pololu mágneses kódoló pár készlet mikro fém hajtóműves motorokhoz – ezek a kódolók jó megoldást jelentenek a robot által megtett távolság mérésére. 12 a CPR felbontás ésszerű a távolságok pontos mérésére. (Link)
-
Arduino Nano micro controller mint MCU-az Arduino platformot választottuk jó kiindulópontnak egy mikromouse robot készítéséhez, mivel az elején fiatalok és tapasztalatlanok voltunk ezen a területen. A kisebb formai tényezőt figyelembe véve az Arduino Nano-t választottuk megoldásunknak. (Link)
-
Dual MC33926 Motor Driver Carrier-én már vásárolt ez a motor vezető korábban. Ezért ezt használtam a micromouse robothoz. Bármilyen jó minőségű, alacsony fogyasztású motorvezérlő használható. De ne feledje, ha alacsony minőségű L29xx motorvezérlőket használ, mivel ez befolyásolhatja a robot reakcióképességét. (Link)
-
MPU6050 Module-ez egy belépési tartomány giroszkóp, amely suite típusok minden robotika alkalmazások. Azon kívül, hogy nagyon költséghatékony, ez a giroszkóp nagyon egyedi tulajdonságokkal rendelkezik, amelyek más magasabb árú modulokból hiányoznak, amelyeket a jövőben egy másik cikkben tervezek fedezni. (Link)
-
éles infravörös távolságérzékelők-ezek az érzékelők pontos távolságmérést biztosítanak, még akkor is, ha a felület ferde, és nem befolyásolja a környezet, a tárgy színe vagy a felület.
a. 4-30cm távolságérzékelő-ezeket az érzékelőket arra használták, hogy megmérjék a távolságot az elülső falaktól, és helyesen igazítsák a robotot egy fordulat előtt (Link)
b. 2-15cm távolságérzékelő-ezeket az érzékelőket a falaktól való távolság mérésére használták, és a robotot párhuzamosan igazították a labirintus falaihoz (Link)
-
5V Buzzer – ez jól jött, mint egy hibakereső jel, ahol használjuk, mint egy auditív visszajelzést tesztelésére a robot. Mivel az Arduino Nano memóriája kisebb, nem tudtunk OLED kijelzőt csatlakoztatni a vizuális visszacsatoláshoz, ezért a hangjelző használata alternatíva volt.
-
gomb Panel – ez áll 3 programozható gombok + reset gombot az MCU. Ez a gombpanel lehetővé tette több tesztprogram beillesztését a robotba, hogy több program feltöltése nélkül Ellenőrizze az összes alapvető funkciót.
-
1200mAh 7.4 V lítium-ion akkumulátor-a 7.4 v-os akkumulátor, termelő 5V és 6V az érzékelők és motorok könnyen elvégezhető step down konverterek.
-
Step down átalakítók-két különálló step down átalakítót használtak az MCU és az érzékelők 5V, a motorvezető 6V biztosítására.
a. LM2596 modul-6V visszalépő átalakító
b. Mini DC 5V 360 Buck Convetor-5v visszalépő átalakító
-
HC – 05 Bluetooth modul – a floodfill algoritmus teszteléséhez egy Bluetooth modult használtunk, ahol információkat küldhetünk mobiltelefonra vagy laptopra.
-
Pololu wheels 32x7mm pár – ezeket a kis kerekeket használtuk a robotunk kis formájú tényezőjének kiegészítésére. a kisebb kerekek sokkal jobban szabályozzák a sebességet. (Link)
először egy 10x10cm^2 kialakítással kezdtük, majd egy kör alakú 8x8cm^2 kialakításra helyeztük a motorokat a robot közepére, hogy a robot könnyebben elforduljon a fordulótengely megváltoztatása nélkül.
sok mindent meg kell vitatni, amikor a mikroméretű robot teszteléséről és programozásáról van szó. Ezért a szakaszok többi részét a sorozat jövőbeli cikkeiben tárgyaljuk, a következő robotunk, az “ONS v2.0” bevezetésével 2019-ben.
íme egy videó a robotunkról, amely a “SLIIT Robofest 2018” verseny döntőjében lép fel. Remélem, megtanultál valamit az első cikkemből az “első lépések a micromouse utazásban”cikksorozatban.
mindig tartsa szem előtt, hogy egyedi legyen, lassan induljon és idővel növekedjen!
kérjük, adja hozzá javaslatait és kérdéseit az alábbiakban, hogy javítsam a jövőbeli cikkeimet. Sok szerencsét, hogy az első micromouse robot. Köszönöm!