Micromouse n’est pas vraiment une compétition de robotique comme je le verrais. C’est une sorte de passe-temps que quelqu’un peut maîtriser tout au long de sa vie. En partant de zéro, en apprenant des bases, il y a un long voyage à découvrir. Tous les grands champions des compétitions internationales de micromouse sont partis des bases. Même si nous voyons les robots complexes qu’ils construisent maintenant, ils ont tous une histoire de réussite derrière eux.
Il s’agit du premier robot micromouse fabriqué par « GreenYee » et son équipe; le champion de micromouse de tous les temps aux États-Unis et le fondateur du site web Micromouse USA. Il ne s’agit pas de tout faire parfaitement au premier essai, mais ce qui compte vraiment, c’est l’amélioration au fil du temps.
La série d’articles de « getting started in the micromouse journey » est écrite avec l’intention de partager comment l’équipe « CircuitBreakers » a commencé son parcours de micromouse. Dans cet article en particulier, je vais donner un aperçu de notre premier robot micromouse « වේග බට්ටා V1.0 ».
Nous avons commencé à concevoir notre premier robot micromouse en 2018 pour participer au niveau de premier cycle du « SLIIT Robofest 2018 ». Après avoir fait nos recherches initiales sur la fabrication de micromouse, nous avons réalisé certains aspects de base à couvrir initialement.
- Trouver un bon matériel et construire le robot
- Mettre en œuvre et tester les fonctions de base du robot; tourner, déplacer des cellules et etc
- Implémentation de l’algorithme de remplissage d’inondation
- Réglage et enregistrement du chemin le plus court
Passons à chaque aspect en détail.
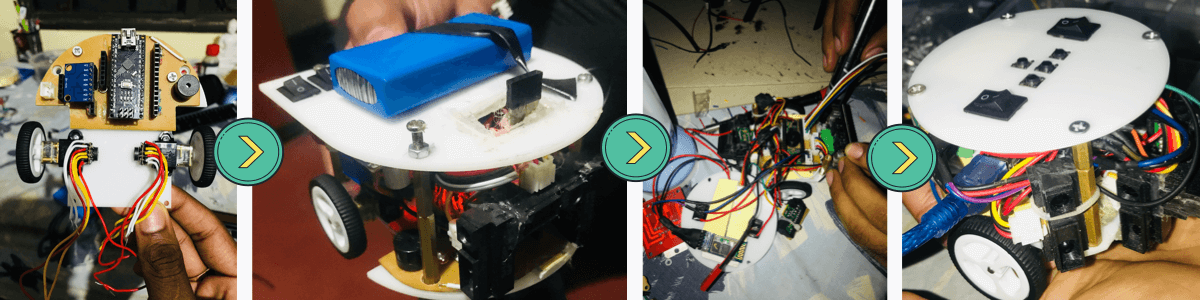
Voici la liste des composants que nous avons utilisés pour concevoir notre robot.
-
Pololu 1200rpm HPCB 6V micro moteurs métalliques à double arbre x 2 – Ces moteurs sont petits et faciles à contrôler. Nous avons dû utiliser la fonction pwm personnalisée pour contrôler ces moteurs car ils étaient trop rapides. Pour le V2.0, nous avons utilisé un régime plus lent du même moteur pour un contrôle plus facile. (Lien)
-
Kit de paires de codeurs magnétiques Pololu pour micro motoréducteurs métalliques – Ces codeurs sont une bonne solution pour mesurer la distance parcourue par le robot. 12 La résolution de la RCP est raisonnable pour mesurer les distances avec précision. (Lien)
-
Microcontrôleur Arduino Nano comme MCU – Nous avons choisi la plate-forme Arduino comme bon point de départ pour fabriquer un robot micromouse car nous étions jeunes et inexpérimentés dans ce domaine au début. Compte tenu du facteur de forme plus petit, nous avons choisi Arduino Nano comme solution. (Lien)
-
Support de pilote de moteur double MC33926 – J’avais acheté ce pilote de moteur précédemment. Par conséquent, je l’ai utilisé pour le robot micromouse. Tout contrôleur de moteur de bonne qualité et de faible puissance peut être utilisé. Mais soyez conscient lorsque vous utilisez des contrôleurs de moteur L29xx de faible qualité, car la réactivité du robot pourrait en être affectée. (Lien)
-
Module MPU6050 – Il s’agit d’un gyroscope d’entrée de gamme qui s’adaptera à toutes les applications de robotique. En plus d’être très rentable, ce gyroscope a des caractéristiques très uniques qui manquent à d’autres modules à prix plus élevés que je prévois de couvrir dans un autre article à l’avenir. (Lien)
-
Capteurs de distance IR pointus – Ces capteurs peuvent fournir des mesures de distance précises même si la surface est inclinée et ne sont pas affectés par l’environnement, la couleur de l’objet ou la surface.
a. Capteur de distance de 4 à 30 cm – Ces capteurs ont été utilisés pour mesurer la distance par rapport aux parois à l’avant et aligner correctement le robot avant un virage (Lien)
b. capteur de distance de 2 à 15 cm – Ces capteurs ont été utilisés pour mesurer la distance aux murs et aligner le robot parallèlement aux murs du labyrinthe (Lien)
-
Buzzer 5V – Cela s’est avéré utile comme signal de débogage où nous l’utilisions comme rétroaction auditive pour tester le robot. Comme l’Arduino Nano a une mémoire plus petite, nous n’avons pas pu connecter un écran OLED pour un retour visuel, donc l’utilisation d’un buzzer était une alternative.
-
Panneau de boutons – Il se compose de 3 boutons programmables + bouton de réinitialisation du MCU. Ce panneau de boutons a permis d’inclure plusieurs programmes de test au robot pour vérifier toutes les fonctions de base sans télécharger plusieurs programmes.
-
Batterie lithium-ion 1200mAh 7.4V – En utilisant une batterie 7.4v, la production de 5v et 6v pour les capteurs et les moteurs peut être facilement réalisée à l’aide de convertisseurs abaisseurs.
-
Convertisseurs abaisseurs – Deux convertisseurs abaisseurs séparés ont été utilisés pour fournir 5V pour le MCU et les capteurs, 6V pour le pilote du moteur.
a. Module LM2596 – Convertisseur abaisseur 6V
b. Convertisseur abaisseur Mini DC 5v 360 – convertisseur abaisseur 5v
-
Module Bluetooth HC-05 – Pour tester l’algorithme de remplissage d’inondation, nous avons utilisé un module Bluetooth où nous pouvons envoyer des informations à un téléphone portable ou à un ordinateur portable.
-
Paire de roues Pololu 32x7mm – nous avons utilisé ces petites roues pour adapter le petit facteur de forme de notre robot. des roues plus petites donnent beaucoup plus de contrôle sur la vitesse. (Lien)
Nous avons d’abord commencé avec un design 10x10cm ^ 2 et sommes passés à un design circulaire 8x8cm ^ 2 où nous avons placé des moteurs au milieu du robot pour faciliter la rotation du robot sans changer l’axe de rotation.
Il y a beaucoup de choses à discuter lorsqu’il s’agit de tester et de programmer un robot micromouse. Par conséquent, le reste des étapes sera discuté dans les prochains articles de cette série avec l’introduction de notre prochain robot « XT V2.0 » en 2019.
Voici une vidéo de notre robot lors de la finale du concours « SLIIT Robofest 2018 ». J’espère que vous avez appris quelque chose de mon premier article dans la série d’articles de « Commencer dans le voyage micromouse ».
Gardez toujours à l’esprit d’être unique, de commencer lentement et de grandir avec le temps!
Veuillez ajouter vos suggestions et questions ci-dessous pour améliorer mes futurs articles. Bonne chance pour fabriquer votre premier robot micromouse. Merci!