Micromouse nu este cu adevărat ca orice altă competiție de robotică așa cum aș vedea. Este un fel de hobby pe care cineva îl poate stăpâni pe tot parcursul vieții. Pornind de la sol în sus, de învățare de la elementele de bază, există drum lung pentru a fi descoperite. Toți marii campioni din competițiile internaționale de micromouse au pornit de la elementele de bază. Chiar dacă vedem roboții complexi construiți de ei acum, toți au o poveste de succes în spatele lor.
acesta este primul robot micromouse realizat de „GreenYee” și echipa sa ; campionul micromouse din toate timpurile din SUA și fondatorul site-ului Micromouse USA. Nu este vorba despre a face totul perfect la prima încercare, dar ceea ce contează cu adevărat este îmbunătățirea în timp.
seria de articole „Noțiuni de bază în călătoria micromouse” este scrisă cu intenția de a împărtăși modul în care echipa „CircuitBreakers” și-a început călătoria de micromouse. În acest articol special, voi oferi o perspectivă despre primul nostru robot micromouse”v1. 0″.
am început să proiectăm primul nostru robot micromouse în 2018 pentru a participa la nivelul de licență al „SLIIT Robofest 2018”. După ce am făcut cercetările noastre inițiale privind realizarea micromouse, am realizat câteva aspecte de bază care trebuie acoperite inițial.
- găsirea unui hardware bun și construirea robotului
- implementarea și testarea funcțiilor de bază ale robotului; cotitură, celule în mișcare și etc
- implementarea algoritmului de umplere a inundațiilor
- reglarea și salvarea celei mai scurte căi
să trecem la fiecare aspect în detaliu.
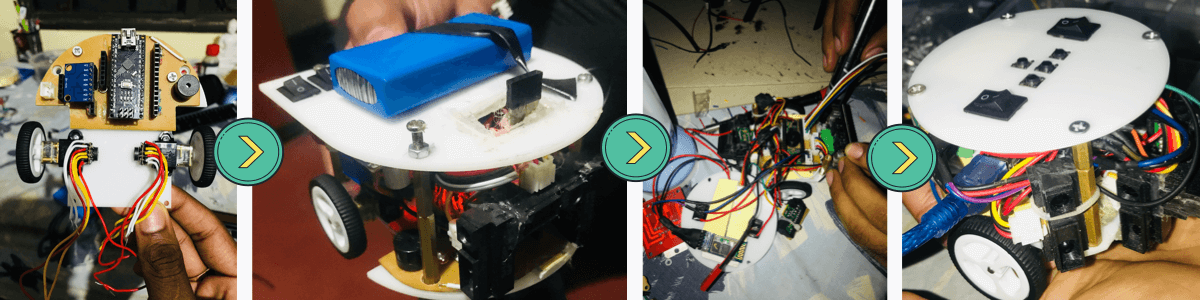
Iată lista componentelor pe care le-am folosit pentru a proiecta robotul nostru.
-
Pololu 1200RPM HPCB 6V Dual ax micro metal motoare x 2-Aceste motoare sunt mici și ușor de controlat. A trebuit să folosim funcția PWM personalizată pentru a controla aceste motoare, deoarece erau prea rapide. Pentru V2.0 Am folosit un rpm mai lent al aceluiași motor pentru un control mai ușor. (Link)
-
Pololu magnetic encoder pair kit pentru motoare micro Metal gear – aceste codificatoare sunt o soluție bună pentru a măsura distanța parcursă de robot. Rezoluția 12 CPR este rezonabilă pentru a măsura cu exactitate distanțele. (Link)
-
Arduino Nano micro controller ca MCU – am ales platforma Arduino ca un bun punct de plecare pentru a face un robot micromouse, deoarece eram tineri și neexperimentați în acest domeniu la început. Având în vedere factorul de formă mai mic, am ales Arduino Nano ca soluție. (Link)
-
dual MC33926 Motor Driver Carrier – am cumpărat acest driver de motor anterior. Prin urmare, am folosit acest lucru pentru robotul micromouse. Se poate folosi orice controler de motor de bună calitate, cu putere redusă. Dar fiți conștienți atunci când utilizați controlere de motor l29xx de calitate scăzută, deoarece capacitatea de reacție a robotului ar putea fi afectată de acesta. (Link)
-
modulul MPU6050 – acesta este un giroscop gama de intrare, care va suita pentru tipurile de toate aplicațiile robotice. În afară de a fi foarte rentabil, acest giroscop are câteva caracteristici foarte unice pe care le lipsesc alte module cu prețuri mai mari, pe care intenționez să le acopăr într-un alt articol în viitor. (Link)
-
Sharp ir distance sensors – acești senzori pot oferi măsurători exacte ale distanței, chiar și suprafața este înclinată și nu este afectată de mediu, culoarea obiectului sau suprafața.
a. senzor de distanță 4-30cm – acești senzori au fost utilizați pentru a măsura distanța față de pereții din față și pentru a alinia corect robotul înainte de o întoarcere (legătură)
b. Senzor de distanță 2-15cm – acești senzori au fost utilizați pentru a măsura distanța față de pereți și pentru a alinia robotul paralel cu pereții labirintului (Link)
-
5V Buzzer – acest lucru a venit la îndemână ca un semnal de depanare în cazul în care am folosit ca un feedback auditiv pentru testarea robotului. Deoarece Arduino Nano are o memorie mai mică, nu am putut conecta un afișaj OLED pentru feedback vizual, prin urmare, utilizarea unui buzzer a fost o alternativă.
-
Panoul butonului-acesta constă din 3 butoane programabile + butonul de resetare al MCU. Acest panou de butoane a permis includerea mai multor programe de testare robotului pentru a verifica toate funcțiile de bază fără a încărca mai multe programe.
-
1200mAh 7.4 V baterie litiu-ion-folosind 7.4 V baterie, producătoare de 5V și 6v pentru senzori și motoare se poate face cu ușurință folosind pas în jos convertoare.
-
convertoare step down-două convertoare step down separate au fost utilizate pentru a furniza 5V pentru MCU și senzori, 6V pentru șoferul motorului.
a. LM2596 modul – 6V pas în jos convertor
b. Mini DC 5V 360 Buck Convetor-5V pas în jos convertor
-
modul Bluetooth HC-05 – pentru testarea algoritmului de inundare, am folosit un modul Bluetooth unde putem trimite informații către un telefon mobil sau laptop.
-
roți Pololu 32x7mm pereche – am folosit aceste roți mici pentru a suita factorul de formă mic al robotului nostru. roțile mai mici oferă mult mai mult control asupra vitezei. (Link)
am început mai întâi cu un design de 10x10cm^2 și am trecut la un design circular de 8x8cm^2, unde am plasat motoare în mijlocul robotului pentru o rotire mai ușoară a robotului fără a schimba axa de rotire.
există multe de discutat atunci când vine vorba de testarea și programarea unui robot micromouse. Prin urmare, restul etapelor vor fi discutate în articolele viitoare din această serie odată cu introducerea următorului nostru robot „XV2.0” în 2019.
Iată un videoclip al robotului nostru care cântă la finala competiției „SLIIT Robofest 2018”. Sper că ați învățat ceva din primul meu articol din seria de articole „Noțiuni de bază în călătoria micromouse”.
păstrați întotdeauna în minte pentru a fi unic, începe lent și să crească cu timpul!
vă rugăm să adăugați sugestiile și întrebările de mai jos pentru a îmbunătăți articolele mele viitoare. Mult noroc a face primul robot micromouse. Mulțumesc!