Micromouse no es realmente como cualquier otra competencia de robótica como yo vería. Es una especie de pasatiempo que alguien puede dominar a lo largo de su vida. Comenzando desde cero, aprendiendo de lo básico, hay un largo viaje por descubrir. Todos los grandes campeones de las competiciones internacionales de micromouse han comenzado desde lo más básico. A pesar de que vemos los robots complejos que construyen ahora, todos tienen una historia de éxito detrás de ellos.
Este es el primer robot micromouse hecho por «GreenYee» y su equipo ; el campeón de micromouse de todos los tiempos en Estados Unidos y el fundador del sitio web Micromouse USA. No se trata de hacer todo perfecto al primer intento, pero lo que realmente importa es la mejora con el tiempo.
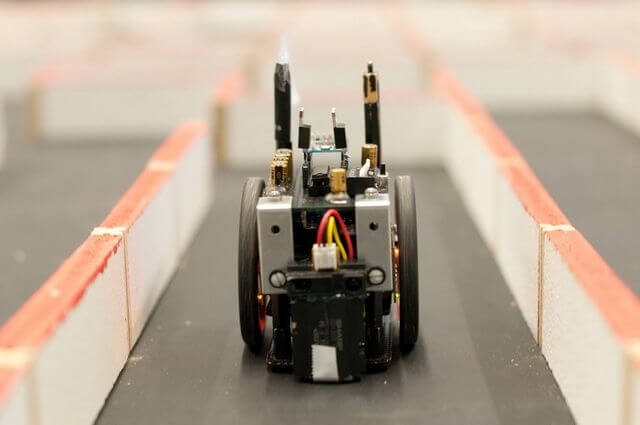
La serie de artículos de «getting started in the micromouse journey» está escrita con la intención de compartir cómo el equipo «CircuitBreakers» comenzó su viaje de micromouse. En este artículo en particular, proporcionaré información sobre nuestro primer robot micromouse «වේග බට්ටා V1. 0».
Comenzamos a diseñar nuestro primer robot micromouse en 2018 para participar en el nivel de pregrado de «SLIIT Robofest 2018». Después de hacer nuestra investigación inicial sobre la fabricación de micromouse, nos hemos dado cuenta de algunos aspectos básicos que se deben cubrir inicialmente.
- Encontrar un buen hardware y construir el robot
- Implementar y probar las funciones básicas del robot; girar, mover celdas, etc.
- Implementar algoritmo de relleno de inundación
- Ajustar y guardar el camino más corto
Pasemos a cada aspecto en detalle.
Aquí está la lista de componentes que hemos utilizado para diseñar nuestro robot.
-
Motores de micro metal de doble eje Pololu 1200 rpm HPCB 6V x 2: Estos motores son pequeños y fáciles de controlar. Tuvimos que usar la función pwm personalizada para controlar estos motores porque eran demasiado rápidos. Para el V2. 0 hemos utilizado un rpm más lento del mismo motor para facilitar el control. (Enlace)
-
Kit de pares de codificadores magnéticos Pololu para motores de engranajes de micro metal: Estos codificadores son una buena solución para medir la distancia recorrida por el robot. 12 La resolución de RCP es razonable para medir distancias con precisión. (Enlace)
-
Controlador micro Nano Arduino como MCU: elegimos la plataforma Arduino como un buen punto de partida para hacer un robot micromouse, ya que éramos jóvenes e inexpertos en este campo al principio. Teniendo en cuenta el factor de forma más pequeño, elegimos Arduino Nano como nuestra solución. (Enlace)
-
Portador de conductor de motor MC33926 dual: Había comprado este controlador de motor anteriormente. Por lo tanto, utilicé esto para el robot micromouse. Se puede utilizar cualquier controlador de motor de buena calidad y baja potencia. Pero tenga en cuenta cuando use controladores de motor L29xx de baja calidad, ya que la capacidad de respuesta del robot podría verse afectada por ella. (Enlace)
-
Módulo MPU6050 – Este es un giroscopio de rango de entrada que se adaptará a todos los tipos de aplicaciones de robótica. Aparte de ser muy rentable, este giroscopio tiene algunas características muy únicas que carecen de otros módulos de mayor precio, que planeo cubrir en otro artículo en el futuro. (Enlace)
-
Sensores de distancia IR nítidos: Estos sensores pueden proporcionar mediciones de distancia precisas incluso si la superficie está inclinada y no se ve afectada por el entorno, el color del objeto o la superficie.
a. Sensor de distancia de 4-30 cm: Estos sensores se utilizaron para medir la distancia a las paredes delanteras y alinear correctamente el robot antes de un giro (Enlace)
b. sensor de distancia de 2 a 15 cm: Estos sensores se utilizaron para medir la distancia a las paredes y alinear el robot paralelo a las paredes del laberinto (Enlace)
-
Zumbador de 5V: esto fue útil como señal de depuración, donde lo usamos como retroalimentación auditiva para probar el robot. Como el Arduino Nano tiene una memoria más pequeña, no pudimos conectar una pantalla OLED para obtener retroalimentación visual, por lo que usar un zumbador era una alternativa.
-
Panel de botones: Consta de 3 botones programables + botón de reinicio de la MCU. Este panel de botones ha permitido incluir varios programas de prueba al robot para verificar todas las funciones básicas sin cargar varios programas.
-
Batería de iones de litio de 1200 mAh 7.4 V: El uso de una batería de 7.4 v, que produce 5v y 6v para los sensores y motores, se puede hacer fácilmente utilizando convertidores reductores.
-
Convertidores descendentes: Se utilizaron dos convertidores descendentes separados para proporcionar 5V para el MCU y los sensores, 6V para el controlador del motor.
a. Módulo LM2596 – convertidor reductor de 6 V
b. Mini DC 5v Convetor de 360 Buck – convertidor reductor de 5v
-
Módulo Bluetooth HC-05: Para probar el algoritmo de llenado de inundación, hemos utilizado un módulo Bluetooth donde podemos enviar información a un teléfono móvil o computadora portátil.
-
Par de ruedas Pololu de 32×7 mm: utilizamos estas ruedas pequeñas para adaptarse al factor de forma pequeño de nuestro robot. las ruedas más pequeñas dan mucho más control sobre la velocidad. (Enlace)
Comenzamos con un diseño de 10x10cm^2 y pasamos a un diseño circular de 8x8cm^2 donde colocamos motores en el centro del robot para facilitar el giro del robot sin cambiar el eje de giro.
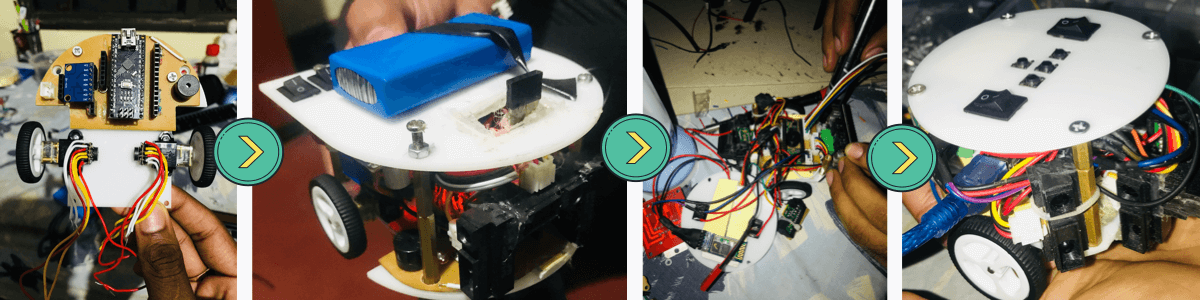
Hay mucho que discutir cuando se trata de probar y programar un robot micromouse. Por lo tanto, el resto de las etapas se discutirán en los futuros artículos de esta serie con la introducción de nuestro próximo robot «වේග බට්ටා V2.0» en 2019.
Aquí hay un video de nuestro robot actuando en la final de la competencia «SLIIT Robofest 2018». Espero que hayas aprendido algo de mi primer artículo de la serie de artículos «Primeros pasos en el viaje de micromouse».
¡Siempre ten en cuenta que debes ser único, comenzar despacio y crecer con el tiempo!
Por favor, agregue sus sugerencias y preguntas a continuación para mejorar mis futuros artículos. Buena suerte haciendo tu primer robot micromouse. ¡Gracias!