Micromouse er ikke rigtig som nogen anden robotkonkurrence, som jeg ville se. Det er en slags hobby, som nogen kan mestre i hele sit liv. Fra jorden op, lære af det grundlæggende, der er lang rejse at blive opdaget. Alle de store mestre i internationale micromouse konkurrencer er startet fra de meget grundlæggende. Selvom vi ser de komplekse robotter Bygge af dem nu, har de alle en succeshistorie bag sig.
dette er den første micromouse robot lavet af “GreenYee” og hans team ; All-time micromouse mester i USA og grundlæggeren af Micromouse USA hjemmeside. Det handler ikke kun om at gøre alt perfekt ved første forsøg, men hvad der virkelig betyder noget er forbedringen over tid.
artikelserien “Kom godt i gang i micromouse journey” er skrevet med det formål at dele, hvordan team “CircuitBreakers” startede sin rejse med micromouse. I denne særlige artikel vil jeg give et indblik i vores første micromouse-robot “Kurt v1.0”.
vi begyndte at designe vores første micromouse robot tilbage i 2018 for at deltage i bachelor niveau af “SLIIT Robofest 2018”. Efter at vi gjorde vores indledende forskning på at gøre micromouse, har vi indset nogle grundlæggende aspekter, der skal dækkes i første omgang.
- find godt udstyr og byg robotten
- implementer og test grundlæggende robotfunktioner; drejning, flytning af celler og etc
- implementering af oversvømmelsesfyldningsalgoritme
- Tuning og lagring af den korteste sti
lad os flytte til hvert aspekt i detaljer.
her er listen over komponenter, vi har brugt til at designe vores robot.
-
Pololu 1200rpm HPCB 6V dual shaft micro metal motors 2-disse motorer er små og nemme at styre. Vi var nødt til at bruge brugerdefineret pm-funktion til at styre disse motorer, fordi de var for hurtige. Til V2.0 har vi brugt en langsommere omdrejningstal af den samme motor for lettere kontrol. (Link)
-
Pololu magnetisk encoder par kit til mikro metal gearmotorer – disse encodere er en god løsning til at måle afstand tilbagelagt af robotten. 12 CPR-opløsning er rimelig til at måle afstande nøjagtigt. (Link)
-
Arduino Nano micro controller som MCU-vi valgte Arduino platform som et godt udgangspunkt for at lave en micromouse robot, da vi var unge og uerfarne på dette område i starten. I betragtning af den mindre formfaktor valgte vi Arduino Nano som vores løsning. (Link)
-
Dual MC33926 Motor Driver Carrier – jeg havde købt denne motor driver tidligere. Derfor brugte jeg dette til micromouse robot. Enhver god kvalitet, lav effekt motor controller kan bruges. Men vær opmærksom på, når du bruger L29-motorstyringer af lav kvalitet, da robotens lydhørhed kan blive påvirket af den. (Link)
-
MPU6050 modul-Dette er en post range gyroskop, som vil suite for Typer alle robotteknologi applikationer. Bortset fra at være meget omkostningseffektiv, har denne gyro nogle meget unikke funktioner, som andre højere prissatte moduler mangler, som jeg planlægger at dække i en anden artikel i fremtiden. (Link)
-
skarpe ir-afstandssensorer – disse sensorer kan give nøjagtige afstandsmålinger, selv overfladen er vinklet og påvirkes ikke af miljøet, objektfarven eller overfladen.
a.4-30cm afstandssensor – disse sensorer blev brugt til at måle afstanden til væggene foran og justere robotten korrekt før en drejning (Link)
B. 2-15 cm afstandssensor – disse sensorer blev brugt til at måle afstanden til væggene og justere roboten parallelt med labyrintens vægge (Link)
-
5V Summer-dette Kom godt med som et fejlsøgningssignal, hvor vi brugte som en auditiv feedback til test af roboten. Da Arduino Nano har en mindre hukommelse, var vi ikke i stand til at forbinde en OLED-skærm til visuel feedback, derfor var det et alternativ at bruge en summer.
-
knappanel – dette består af 3 programmerbare knapper + reset-knap på MCU. Dette knappanel har aktiveret at inkludere flere testprogrammer til roboten for at kontrollere alle de grundlæggende funktioner uden at uploade flere programmer.
-
1200mAh 7.4 V lithium ion batteri-ved hjælp af 7.4 V batteri, der producerer 5v og 6V for sensorer og motorer kan nemt gøres ved hjælp af trin ned konvertere.
-
trin ned konvertere – to separate trin ned konvertere blev brugt til at give 5V til MCU og sensorer, 6V til motordriveren.
a. Lm2596 modul-6V trin ned konverter
b. Mini DC 5V 360 Buck Convetor-5v trin ned konverter
-
HC – 05 Bluetooth-modul-til test af oversvømmelsesalgoritmen har vi brugt et Bluetooth-modul, hvor vi kan sende information til en mobiltelefon eller bærbar computer.
-
Pololu hjul 32h7mm par-vi brugte disse små hjul til at passe den lille formfaktor på vores robot. mindre hjul giver meget mere kontrol over hastigheden. (Link)
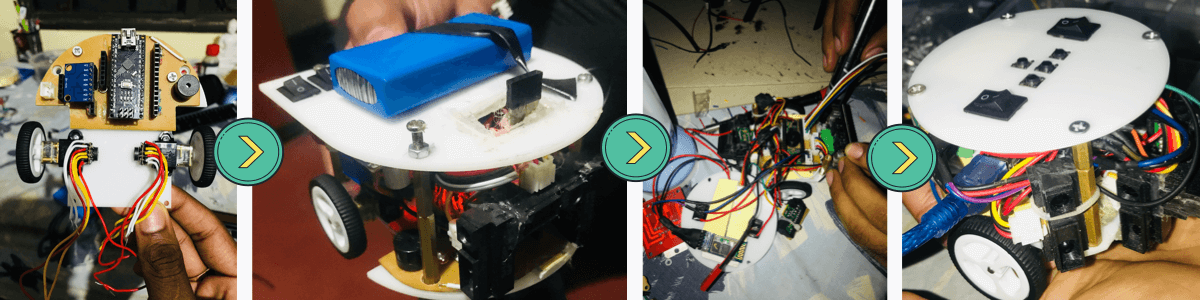
vi er først startet med et 10h10cm^2 design og flyttet til et cirkulært 8h8cm^2 design, hvor vi placerede motorer midt i robotten for lettere drejning af robotten uden at ændre drejeaksen.
der er meget at diskutere, når det kommer til test og programmering af en micromouse-robot. Derfor vil resten af etaperne blive diskuteret i de fremtidige artikler i denne serie med introduktionen af vores næste robot “Kurt v2.0” i 2019.
her er en video af vores robot, der udfører i finalen i “SLIIT Robofest 2018” konkurrence. Håber du lærte noget ud af min første artikel i artikelserien “Kom godt i gang i micromouse journey”.
husk altid at være unik, start langsomt og vokse med tiden!
Tilføj venligst dine forslag og spørgsmål nedenfor for at forbedre mine fremtidige artikler. Held og lykke med at lave din første micromouse robot. Tak Skal Du Have!