Micromouse nie jest tak naprawdę jak inne zawody robotyki, jak bym zobaczył. To rodzaj hobby, które ktoś może opanować przez całe życie. Zaczynając od podstaw, ucząc się od podstaw, czeka nas długa podróż do odkrycia. Wszyscy wielcy mistrzowie w międzynarodowych zawodach micromouse zaczęli od samych podstaw. Mimo, że widzimy złożone roboty zbudowane przez nich teraz, wszystkie mają za sobą historię sukcesu.
jest to pierwszy robot micromouse wykonany przez „GreenYee”i jego zespół; wszech czasów mistrz micromouse w USA i założyciel strony Micromouse USA. Nie chodzi tylko o to, aby robić wszystko perfekcyjnie za pierwszym razem, ale tak naprawdę liczy się poprawa w miarę upływu czasu.
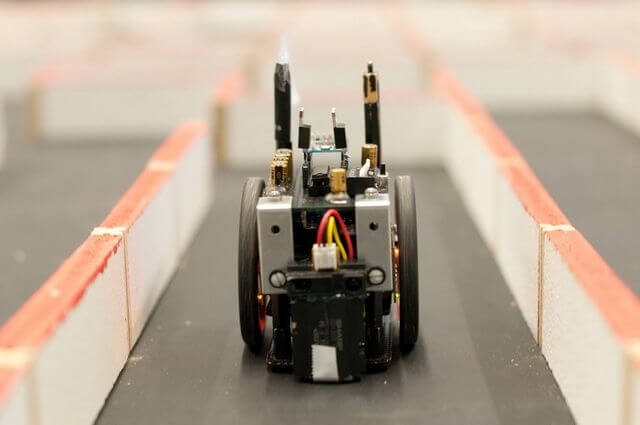
seria artykułów „pierwsze kroki w podróży micromouse” jest napisana z zamiarem podzielenia się tym, jak zespół „CircuitBreakers” rozpoczął swoją podróż micromouse. W tym artykule przedstawię kilka informacji na temat naszego pierwszego robota micromouse”වගග්ාා v1.0″.
zaczęliśmy projektować naszego pierwszego robota micromouse już w 2018 roku, aby wziąć udział w studiach licencjackich „SLIIT Robofest 2018”. Po tym, jak przeprowadziliśmy nasze wstępne badania nad tworzeniem micromouse, zdaliśmy sobie sprawę z kilku podstawowych aspektów, które należy początkowo objąć.
- znalezienie dobrego sprzętu i zbudowanie robota
- wdrożenie i przetestowanie podstawowych funkcji robota;
- implementacja algorytmu wypełniania powodziowego
- Dostrajanie i zapisywanie najkrótszej ścieżki
przejdźmy do każdego aspektu ze szczegółami.
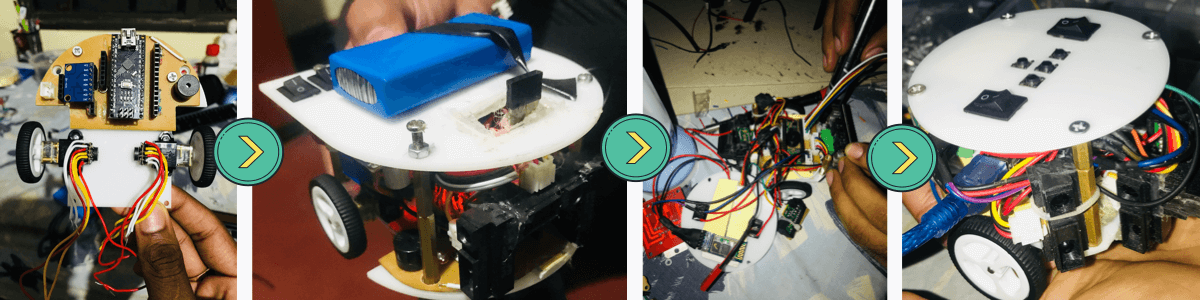
oto lista komponentów, których użyliśmy do zaprojektowania naszego robota.
-
Pololu 1200rpm hpcb 6V z podwójnym wałkiem micro metal motors x 2-silniki te są małe i łatwe do sterowania. Musieliśmy użyć niestandardowej funkcji pwm do sterowania tymi silnikami, ponieważ były zbyt szybkie. Dla V2. 0 użyliśmy wolniejszych obrotów tego samego silnika dla łatwiejszej kontroli. (Link)
-
zestaw par enkoderów magnetycznych Pololu do silników z przekładnią metalową micro-te Enkodery są dobrym rozwiązaniem do pomiaru odległości przebytej przez robota. 12 rozdzielczość CPR jest rozsądna, aby dokładnie mierzyć odległości. (Link)
-
Arduino Nano micro controller jako MCU-wybraliśmy platformę Arduino jako dobry punkt wyjścia do zrobienia robota micromouse, ponieważ na początku byliśmy młodzi i niedoświadczeni w tej dziedzinie. Biorąc pod uwagę mniejszy współczynnik kształtu wybraliśmy Arduino Nano jako nasze rozwiązanie. (Link)
-
Dual MC33926 Motor Driver Carrier-wcześniej kupiłem ten sterownik silnika. Dlatego użyłem tego do robota micromouse. Można użyć dowolnego kontrolera silnika o dobrej jakości i niskiej mocy. Należy jednak pamiętać o używaniu niskiej jakości sterowników silnika L29xx, ponieważ może to mieć wpływ na czas reakcji robota. (Link)
-
moduł MPU6050 – jest to żyroskop wejściowy, który będzie pasował do wszystkich typów aplikacji robotycznych. Poza tym, że jest bardzo opłacalny, ten żyroskop ma kilka bardzo unikalnych funkcji, których brakuje innym droższym modułom, które planuję omówić w innym artykule w przyszłości. (Link)
-
ostre Czujniki odległości IR-czujniki te mogą zapewnić dokładne pomiary odległości, nawet jeśli powierzchnia jest nachylona i nie ma na nią wpływu środowisko, kolor obiektu ani powierzchnia.
a. czujnik odległości 4-30cm-czujniki te były używane do pomiaru odległości od ścian z przodu i prawidłowego wyrównania robota przed zakrętem (Link)
b. Czujnik odległości 2-15cm-czujniki te zostały użyte do pomiaru odległości od ścian i wyrównania robota równolegle do ścian labiryntu (Link)
-
5V Brzęczyk-przydał się jako sygnał debugowania, gdzie użyliśmy jako słuchowego sprzężenia zwrotnego do testowania robota. Ponieważ Arduino Nano ma mniejszą pamięć, nie byliśmy w stanie podłączyć wyświetlacza OLED do wizualnego sprzężenia zwrotnego, dlatego użycie brzęczyka było alternatywą.
-
panel przycisków-składa się z 3 programowalnych przycisków + przycisk reset MCU. Ten panel przycisków umożliwił dołączenie kilku programów testowych do robota, aby sprawdzić wszystkie podstawowe funkcje bez przesyłania kilku programów.
-
akumulator litowo-jonowy 1200mAh 7,4 V-za pomocą akumulatora 7,4 v, wytwarzającego 5 V i 6 V dla czujników i silników można łatwo wykonać za pomocą konwerterów schodkowych.
-
Konwertery stopniowe-dwa oddzielne Konwertery stopniowe zostały użyte do zapewnienia 5V dla MCU i czujników, 6V dla sterownika silnika.
a. moduł LM2596 – konwerter 6V
B. Konwerter Mini DC 5V 360 Buck – Konwerter 5V step down
-
moduł Bluetooth HC-05 – do testowania algorytmu floodfill wykorzystaliśmy moduł Bluetooth, w którym możemy wysyłać informacje na telefon komórkowy lub laptopa.
-
koła Pololu 32x7mm para-wykorzystaliśmy te małe kółka do dopasowania małego współczynnika kształtu naszego robota. mniejsze koła dają znacznie większą kontrolę nad prędkością. (Link)
zaczęliśmy od projektu 10x10cm^2 i przenieśliśmy się do okrągłego projektu 8x8cm^2, w którym umieściliśmy silniki na środku robota, aby ułatwić obracanie robota bez zmiany osi obrotu.
jest wiele do omówienia, jeśli chodzi o testowanie i programowanie robota micromouse. W związku z tym pozostałe etapy zostaną omówione w przyszłych artykułach z tej serii wraz z wprowadzeniem naszego następnego robota „වගග්ාා v2.0” w 2019 roku.
Oto wideo z naszego robota występującego w finale konkursu „SLIIT Robofest 2018”. Mam nadzieję, że nauczyłeś się czegoś z mojego pierwszego artykułu w serii artykułów „pierwsze kroki w podróży micromouse”.
zawsze pamiętaj, aby być wyjątkowym, zacznij powoli i rozwijaj się z czasem!
proszę dodać swoje sugestie i pytania poniżej, aby poprawić moje przyszłe artykuły. Powodzenia w tworzeniu pierwszego robota micromouse. Dziękuję!