Micromouse não é realmente como qualquer outra competição de robótica como eu gostaria de ver. É uma espécie de hobby que alguém pode dominar ao longo de sua vida. Começando do zero, aprendendo com o básico, há uma longa jornada a ser descoberta. Todos os grandes campeões em competições internacionais de micromouse começaram desde o básico. Mesmo que vejamos os robôs complexos construídos por eles agora, todos eles têm uma história de sucesso por trás deles.
este é o primeiro robô micromouse feito por” GreenYee ” e sua equipe ; o campeão de micromouse de todos os tempos nos EUA e o fundador do site Micromouse EUA. Não se trata de fazer tudo perfeito na primeira tentativa, mas o que realmente importa é a melhoria ao longo do tempo.
a série de artigos de “getting started in the micromouse journey” é escrita com a intenção de compartilhar como a equipe “CircuitBreakers” iniciou sua jornada de micromouse. Neste artigo em particular, fornecerei algumas informações sobre nosso primeiro robô micromouse “වේග බට්ටා v1.0”.
começamos a projetar nosso primeiro robô micromouse em 2018 para participar do nível de graduação do “Sliit Robofest 2018”. Depois que fizemos nossa pesquisa inicial sobre como fazer micromouse, percebemos alguns aspectos básicos a serem abordados inicialmente.
- encontrar um bom hardware e construir o robô
- implementar e testar funções básicas do robô; transformando, movendo células e etc
- implementando o algoritmo de preenchimento de inundação
- ajustando e salvando o caminho mais curto
vamos passar para cada aspecto em detalhes.
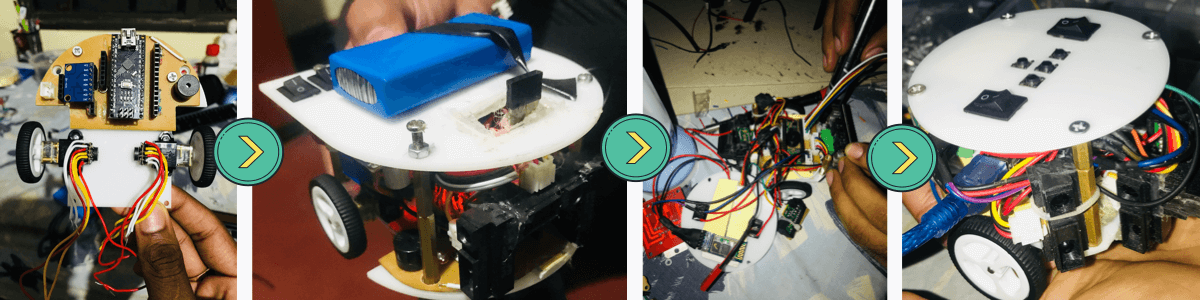
aqui está a lista de componentes que usamos para projetar nosso robô.
-
Pololu 1200RPM HPCB 6V dual shaft micro metal motors x 2-Estes motores são pequenos e fáceis de controlar. Tivemos que usar a função pwm personalizada para controlar esses motores porque eles eram muito rápidos. Para o V2.0, usamos uma rpm mais lenta do mesmo motor para facilitar o controle. (Link)
-
Pololu Magnetic encoder par kit para micro metal gear motors-estes codificadores são uma boa solução para medir a distância percorrida pelo robô. 12 a resolução CPR é razoável para medir distâncias com precisão. (Link)
-
Arduino Nano Micro controller como o MCU-escolhemos a plataforma Arduino como um bom ponto de partida para fazer um robô micromouse, pois éramos jovens e inexperientes neste campo no início. Considerando o Fator de forma menor, escolhemos o Arduino Nano como nossa solução. (Link)
-
portador duplo do motorista do motor MC33926 – eu tinha comprado este motorista do motor anteriormente. Portanto, usei isso para o robô micromouse. Qualquer boa qualidade, controlador de motor de baixa potência pode ser usado. Mas esteja ciente ao usar controladores de motor L29xx de baixa qualidade, pois a capacidade de resposta do robô pode ser afetada por ele. (Link)
-
módulo MPU6050 – este é um giroscópio de gama de entrada que irá suite para tipos Todas as aplicações de Robótica. Além de ser muito rentável, este giroscópio tem algumas características muito originais que outros módulos de preços mais elevados falta que eu estou planejando para cobrir em outro artigo no futuro. (Link)
-
Sharp sensores de distância IR-estes sensores podem fornecer medições de distância precisas até mesmo a superfície é Angular e não são afetados pelo ambiente, cor do objeto ou superfície.
A. sensor de distância de 4-30cm – esses sensores foram usados para medir a distância até as paredes na frente e alinhar o robô corretamente antes de uma curva (Link)
B. 2-15cm sensor de Distância – Estes sensores foram utilizados para medir a distância de paredes e alinhar o robô paralelo às paredes do labirinto (Link)
-
5V Campainha – Esse veio a calhar como um sinal de depuração, onde foi utilizada como um auditory feedback para testar o robô. Como o Arduino Nano tem uma memória menor, não conseguimos conectar um display OLED para feedback visual, portanto, usar uma campainha era uma alternativa.
-
Painel de botões-isso consiste em 3 botões programáveis + botão de reset do MCU. Este painel de botões permitiu incluir vários programas de teste para o robô para verificar todas as funções básicas sem carregar vários programas.
-
1200 mah 7.4 V bateria de iões de lítio – Usando 7.4 V bateria, produzindo 5 V e 6 V para os sensores e motores pode ser facilmente feito usando step down conversores.
-
dois conversores step down separados foram usados para fornecer 5V para o MCU e sensores, 6V para o driver do motor.
A. LM2596 Módulo – 6V step down conversor
B. Mini DC 5V 360 Buck Convetor – 5V step down conversor
-
módulo Bluetooth HC-05 – para testar o algoritmo floodfill, usamos um módulo Bluetooth onde podemos enviar informações para um telefone celular ou laptop.
-
Pololu wheels 32x7mm par-usamos essas pequenas rodas para acomodar o pequeno fator de forma do nosso robô. rodas menores dão muito mais controle sobre a velocidade. (Link)
começamos com um design de 10x10cm^2 e mudamos para um design circular de 8x8cm^2, onde colocamos motores no meio do robô para facilitar o giro do robô sem alterar o eixo de giro.
há muito a discutir quando se trata de testar e programar um robô micromouse. Portanto, o resto das etapas será discutido nos futuros artigos desta série com a introdução do nosso próximo robô “වේග බට්ටා v2.0” em 2019.
aqui está um vídeo do nosso robô se apresentando nas finais da competição” Sliit Robofest 2018″. Espero que você tenha aprendido algo do meu primeiro artigo na série de artigos de “Getting started in the micromouse journey”.
lembre-se sempre de ser único, comece devagar e cresça com o tempo!
por favor, adicione suas sugestões e perguntas abaixo para melhorar meus artigos futuros. Boa sorte fazendo seu primeiro robô micromouse. Obrigada!