Micromouse ist nicht wirklich wie jeder andere Robotikwettbewerb, wie ich sehen würde. Es ist eine Art Hobby, das jemand sein ganzes Leben lang meistern kann. Von Grund auf neu beginnen, von den Grundlagen lernen, Es gibt eine lange Reise zu entdecken. Alle großen Champions in internationalen Micromouse-Wettbewerben haben von Anfang an angefangen. Obwohl wir die komplexen Roboter, die sie jetzt bauen, sehen, haben sie alle eine Erfolgsgeschichte hinter sich.
Dies ist die erste micromouse roboter made durch „GreenYee“ und seine team; die alle-zeit micromouse champion in USA und die gründer von Micromouse USA website. Es geht nicht nur darum, beim ersten Versuch alles perfekt zu machen, aber was wirklich zählt, ist die Verbesserung im Laufe der Zeit.
Die Artikelserie „getting started in the micromouse journey“ wurde mit der Absicht geschrieben, zu teilen, wie das Team „CircuitBreakers“ seine Reise von micromouse begann. In diesem speziellen Artikel werde ich einen Einblick in unseren ersten Micromouse-Roboter „වේග බට්ටා V1.0“ geben.
Wir haben bereits 2018 mit der Entwicklung unseres ersten Micromouse-Roboters begonnen, um am Undergraduate-Level des „SLIIT Robofest 2018“ teilzunehmen. Nachdem wir unsere ersten Forschungen zur Herstellung von Micromouse durchgeführt haben, haben wir einige grundlegende Aspekte erkannt, die zunächst behandelt werden müssen.
- Gute Hardware finden und den Roboter bauen
- Grundlegende Roboterfunktionen implementieren und testen; drehen, Verschieben von Zellen usw.
- Implementieren des Füllalgorithmus
- Optimieren und Speichern des kürzesten Pfades
Gehen wir zu jedem Aspekt im Detail über.
Hier ist die Liste der Komponenten, die wir verwendet haben, um unseren Roboter zu entwerfen.
-
Pololu 1200 rpm HPCB 6 V dual welle micro metall motoren x 2-Diese motoren sind kleine und einfach zu steuern. Wir mussten benutzerdefinierte PWM-Funktion verwenden, um diese Motoren zu steuern, weil sie zu schnell waren. Für die V2.0 haben wir zur einfacheren Steuerung eine langsamere Drehzahl desselben Motors verwendet. (Verknüpfung)
-
Pololu magnetische encoder paar kit für micro metall getriebe motoren-Diese encoder sind eine gute lösung zu messen abstand gereist durch die roboter. 12 Die CPR-Auflösung ist angemessen, um Entfernungen genau zu messen. (Verknüpfung)
-
Arduino Nano Micro Controller als MCU – Wir haben die Arduino-Plattform als guten Ausgangspunkt für die Entwicklung eines Micromouse-Roboters gewählt, da wir zu Beginn jung und unerfahren auf diesem Gebiet waren. In Anbetracht des kleineren Formfaktors haben wir Arduino Nano als Lösung gewählt. (Verknüpfung)
-
Dual MC33926 Motor Driver Carrier – Ich hatte diesen Motortreiber zuvor gekauft. Daher habe ich dies für den Micromouse-Roboter verwendet. Jede gute qualität, low power motor controller können verwendet werden. Seien Sie sich jedoch bewusst, wenn Sie minderwertige L29xx-Motorsteuerungen verwenden, da dies die Reaktionsfähigkeit des Roboters beeinträchtigen kann. (Verknüpfung)
-
MPU6050 Modul-Dies ist ein eintrag palette gyroskop, die werden suite für fast alle robotik anwendungen. Abgesehen davon, dass dieser Kreisel sehr kostengünstig ist, verfügt er über einige einzigartige Funktionen, die anderen höherpreisigen Modulen fehlen, die ich in Zukunft in einem anderen Artikel behandeln möchte. (Verknüpfung)
-
Sharp IR abstand sensoren-Diese sensoren können bieten genaue abstand messungen auch die oberfläche ist abgewinkelt und sind nicht betroffen durch die umwelt, objekt farbe oder oberfläche.
a. 4-30cm Abstandssensor – Diese Sensoren wurden verwendet, um den Abstand zu den vorderen Wänden zu messen und den Roboter vor einer Kurve richtig auszurichten (Link)
b. 2-15cm Abstandssensor – Diese Sensoren wurden verwendet, um den Abstand zu den Wänden zu messen und den Roboter parallel zu den Wänden des Labyrinths auszurichten (Link)
-
5V Summer – Dies war praktisch als Debugging-Signal, bei dem wir als auditives Feedback zum Testen des Roboters verwendet haben. Da der Arduino Nano über einen kleineren Speicher verfügt, konnten wir kein OLED-Display für visuelles Feedback anschließen.
-
Taste Panel-Diese bestehen aus 3 programmierbare tasten + reset-taste der MCU. Dieses Tastenfeld hat es ermöglicht, mehrere Testprogramme in den Roboter aufzunehmen, um alle Grundfunktionen zu überprüfen, ohne mehrere Programme hochladen zu müssen.
-
1200 mAh 7,4 V lithium-ionen batterie-Mit 7,4 v batterie, herstellung 5 v und 6 v für die sensoren und motoren kann leicht durchgeführt mit schritt unten konverter.
-
Abwärtswandler – Zwei separate Abwärtswandler wurden verwendet, um 5 V für die MCU und die Sensoren bereitzustellen, 6 V für den Motortreiber.
a. LM2596 Modul-6 V schritt unten konverter
b. Mini DC 5 v 360 Buck Convetor-5 v schritt unten konverter
-
HC-05 Bluetooth-Modul – Zum Testen des Floodfill-Algorithmus haben wir ein Bluetooth-Modul verwendet, mit dem wir Informationen an ein Mobiltelefon oder einen Laptop senden können.
-
Pololu Räder 32x7mm Paar – Wir haben diese kleinen Räder verwendet, um den kleinen Formfaktor unseres Roboters anzupassen. kleinere Räder geben viel mehr Kontrolle über die Geschwindigkeit. (Verknüpfung)
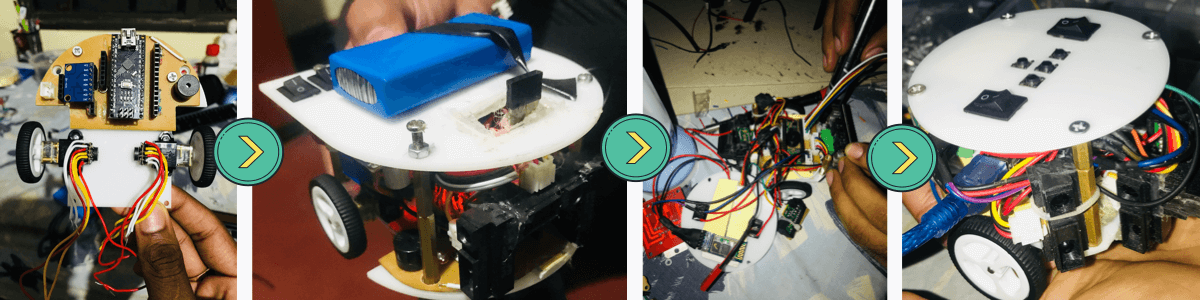
Wir haben zuerst mit einem 10x10cm ^ 2-Design begonnen und sind zu einem kreisförmigen 8x8cm ^ 2-Design übergegangen, bei dem wir Motoren in der Mitte des Roboters platziert haben, um das Drehen des Roboters zu erleichtern, ohne die Drehachse zu ändern.
Es gibt viel zu besprechen, wenn es um das Testen und Programmieren eines Micromouse-Roboters geht. Daher werden die restlichen Phasen in den zukünftigen Artikeln dieser Serie mit der Einführung unseres nächsten Roboters „වේග බට්ටා V2.0“ im Jahr 2019 besprochen.
Hier ist ein Video unseres Roboters beim Finale des Wettbewerbs „SLIIT Robofest 2018“. Ich hoffe, Sie haben etwas aus meinem ersten Artikel in der Artikelserie „Erste Schritte auf der Micromouse-Reise“ gelernt.
Denken Sie immer daran, einzigartig zu sein, langsam anzufangen und mit der Zeit zu wachsen!
Bitte fügen Sie Ihre Vorschläge und Fragen unten hinzu, um meine zukünftigen Artikel zu verbessern. Viel Glück beim Erstellen Ihres ersten Micromouse-Roboters. Vielen Dank!