Micromouse är inte riktigt som någon annan robotkonkurrens som jag skulle se. Det är typ av en hobby som någon kan behärska under hela sitt liv. Börja från grunden, lära av grunderna, det finns en lång resa att upptäcka. Alla de stora mästarna i internationella micromouse-tävlingar har börjat från själva grunderna. Även om vi ser de komplexa robotarna bygga av dem nu, har de alla en framgångshistoria bakom sig.
Detta är den första micromouse-roboten gjord av ”GreenYee” och hans team ; micromouse-mästaren i USA och grundaren av micromouse USA: s webbplats. Det handlar inte bara om att göra allt perfekt vid första försöket, men det som verkligen betyder något är förbättringen över tiden.
artikelserien ” komma igång i micromouse journey ”är skriven med avsikt att dela hur team” CircuitBreakers ” startade sin resa med micromouse. I den här artikeln kommer jag att ge lite insikt om vår första micromouse-robot ”Bisexuell v1.0”.
vi började designa vår första micromouse robot tillbaka i 2018 för att delta i grundutbildningen ”SLIIT Robofest 2018”. Efter att vi gjorde vår första forskning om att göra micromouse har vi insett några grundläggande aspekter som ska täckas initialt.
- hitta bra hårdvara och bygga roboten
- implementera och testa grundläggande robotfunktioner; svarvning, rörliga celler och etc
- genomförande översvämning fyll algoritm
- Tuning och spara den kortaste vägen
Låt oss flytta till varje aspekt i detalj.
här är listan över komponenter som vi har använt för att designa vår robot.
-
Pololu 1200RPM HPCB 6V dual shaft micro metal motors x 2 – dessa motorer är små och lätta att styra. Vi var tvungna att använda anpassad pwm-funktion för att styra dessa motorer eftersom de var för snabba. För V2.0 har vi använt en långsammare varvtal av samma motor för enklare kontroll. (Länk)
-
Pololu magnetic encoder pair kit för micro metal gear motors – dessa kodare är en bra lösning för att mäta avstånd som reste av roboten. 12 HLR-upplösning är rimlig för att mäta avstånd exakt. (Länk)
-
Arduino Nano micro controller som MCU-vi valde Arduino-plattformen som en bra utgångspunkt för att göra en micromouse-robot eftersom vi var unga och oerfarna på detta område i början. Med tanke på den mindre formfaktorn valde vi Arduino Nano som vår lösning. (Länk)
-
Dual MC33926 Motor Driver Carrier – jag hade köpt denna motor driver tidigare. Därför använde jag detta för micromouse-roboten. Någon god kvalitet, låg effekt motorstyrenhet kan användas. Men var medveten om när du använder l29xx-motorstyrenheter av låg kvalitet, eftersom robotens lyhördhet kan påverkas av den. (Länk)
-
MPU6050 Module-Detta är ett ingångsområde gyroskop som kommer att passa för Typer alla robotikapplikationer. Annat än att vara mycket kostnadseffektivt, har denna gyro några mycket unika egenskaper som andra högre prissatta moduler saknar som jag planerar att täcka i en annan artikel i framtiden. (Länk)
-
skarpa IR – avståndssensorer – dessa sensorer kan ge exakta avståndsmätningar även om ytan är vinklad och inte påverkas av miljön, objektfärgen eller ytan.
a. 4-30cm avståndssensor – dessa sensorer användes för att mäta avståndet till väggarna framför och rikta roboten korrekt före en sväng (länk)
b. 2-15cm avståndssensor – dessa sensorer användes för att mäta avståndet till väggarna och rikta roboten parallellt med väggarna i labyrinten (länk)
-
5V Summer-detta kom till nytta som en felsökningssignal där vi använde som en auditiv feedback för att testa roboten. Eftersom Arduino Nano har ett mindre minne kunde vi inte ansluta en OLED-skärm för visuell återkoppling, därför var det ett alternativ att använda en Summer.
-
Knapppanel-detta består av 3 programmerbara knappar + återställningsknapp på MCU. Denna knapppanel har gjort det möjligt att inkludera flera testprogram till roboten för att kontrollera alla grundläggande funktioner utan att ladda upp flera program.
-
1200mAh 7.4 V litiumjonbatteri-med 7.4 v-batteri, som producerar 5v och 6V för sensorerna och motorerna kan enkelt göras med step down-omvandlare.
-
Step down-omvandlare-två separata step down-omvandlare användes för att tillhandahålla 5V för MCU och sensorer, 6V för motordrivaren.
a. Lm2596 modul – 6V steg ner omvandlare
b. Mini DC 5V 360 Buck Convetor-5v steg ner omvandlare
-
HC-05 Bluetooth Module – för att testa floodfill-algoritmen har vi använt en Bluetooth-modul där vi kan skicka information till en mobiltelefon eller bärbar dator.
-
Pololu wheels 32x7mm Pair-vi använde dessa små hjul för att passa den lilla formfaktorn för vår robot. mindre hjul ger mycket mer kontroll över hastigheten. (Länk)
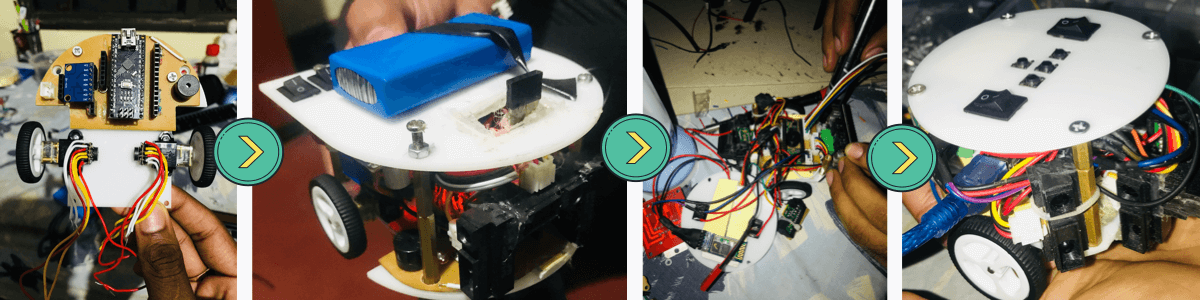
vi har först börjat med en 10x10cm^2 design och flyttat till en cirkulär 8x8cm^2 design där vi placerade motorer i mitten av roboten för enklare vridning av roboten utan att ändra svängaxeln.
det finns mycket att diskutera när det gäller testning och programmering av en micromouse-robot. Därför kommer resten av stadierna att diskuteras i de framtida artiklarna i denna serie med introduktionen av vår nästa robot ”bisexual v2.0” 2019.
här är en video av vår robot som utför vid finalen i” SLIIT Robofest 2018 ” – tävlingen. Hoppas du lärde dig något av min första artikel i artikelserien ”komma igång i micromouse journey”.
Tänk alltid på att vara unik, börja långsamt och växa med tiden!
Lägg till dina förslag och frågor nedan för att förbättra mina framtida artiklar. Lycka till att göra din första micromouse robot. Tack!