Micromouse is niet echt zoals elke andere roboticawedstrijd zoals ik zou zien. Het is een soort hobby die iemand zijn hele leven kan beheersen. Vanaf de grond af, leren van de basis, Er is een lange reis te ontdekken. Alle grote kampioenen in internationale micromouse wedstrijden zijn begonnen vanaf de basis. Ook al zien we de complexe robots die ze nu bouwen, ze hebben allemaal een succesverhaal achter zich.
Dit is de eerste micromouse robot gemaakt door” GreenYee ” en zijn team ; de all-time micromouse champion in de VS en de oprichter van Micromouse USA website. Het gaat er niet alleen om alles perfect te doen bij de eerste poging, maar wat er echt toe doet is de verbetering in de tijd.
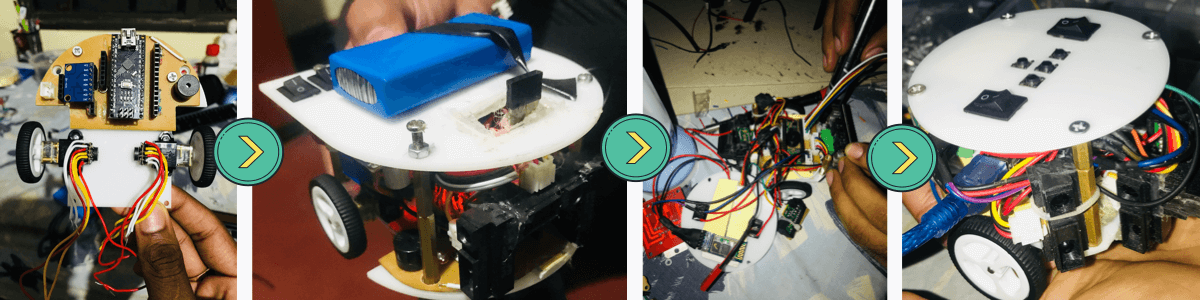
de artikelserie ” getting started in The micromouse journey “is geschreven met de bedoeling om te delen hoe Team” CircuitBreakers ” zijn reis van micromouse begon. In dit artikel zal ik wat inzicht geven over onze eerste micromouse robot “වේග බට්ටා v1.0”.
we zijn in 2018 begonnen met het ontwerpen van onze eerste micromuisrobot om deel te nemen aan het undergraduate niveau van “SLIIT Robofest 2018”. Nadat we ons eerste onderzoek naar het maken van micromouse hebben gedaan, hebben we een aantal fundamentele aspecten gerealiseerd die in eerste instantie moeten worden behandeld.
- goede hardware vinden en de robot bouwen
- basisfuncties van de robot implementeren en testen; draaien, verplaatsen van cellen en etc
- Implementing flood fill algorithm
- Tuning and saving the shortest path
laten we naar elk aspect in detail gaan.
hier is de lijst van componenten die we hebben gebruikt om onze robot te ontwerpen.
-
Pololu 1200rpm HPCB 6V dual shaft micro metal motors x 2-Deze motoren zijn klein en gemakkelijk te bedienen. We moesten aangepaste pwm-functie gebruiken om deze motoren te besturen omdat ze te snel waren. Voor de V2. 0 hebben we een trager toerental van dezelfde motor gebruikt voor eenvoudiger controle. (Verband)
-
Pololu magnetische encoder pair kit voor micro metalen tandwielmotoren – deze encoders zijn een goede oplossing om de afstand te meten die door de robot wordt afgelegd. 12 reanimatie resolutie is redelijk om afstanden nauwkeurig te meten. (Verband)
-
het microcontrolemechanisme van Arduino Nano als MCU-wij kozen Arduino-platform als goed beginpunt om een micromuisrobot te maken aangezien wij jong en onervaren op dit gebied bij het begin waren. Gezien de kleinere vormfactor kozen we Arduino Nano als onze oplossing. (Verband)
-
Dual MC33926 Motor Driver Carrier – ik had deze motor driver eerder gekocht. Daarom heb ik dit gebruikt voor de micromuisrobot. Om het even welke goede kwaliteit, laag machtsmotorcontrolemechanisme kan worden gebruikt. Maar wees ervan bewust bij het gebruik van lage kwaliteit l29xx motor controllers als de responsiviteit van de robot kan worden beïnvloed door het. (Verband)
-
MPU6050 Module-Dit is een entry range gyroscoop die zal suite voor types alle robotica toepassingen. Anders dan zeer kosteneffectief, deze gyro heeft een aantal zeer unieke functies die andere hoger geprijsde modules ontbreken die ik van plan ben te dekken in een ander artikel in de toekomst. (Verband)
-
scherpe ir-afstandssensoren-deze sensoren kunnen nauwkeurige afstandsmetingen leveren, zelfs als het oppervlak schuin is en niet wordt beïnvloed door de omgeving, de objectkleur of het oppervlak.
a. 4-30cm afstandssensor-deze sensoren werden gebruikt om de afstand tot de wanden aan de voorkant te meten en de robot correct uit te lijnen voor een bocht (Link)
b. 2-15cm afstandssensor – deze sensoren werden gebruikt om de afstand tot de wanden te meten en de robot parallel aan de wanden van het doolhof uit te lijnen (Link)
-
5v zoemer – dit kwam van pas als een debug-signaal waar we gebruikt als een auditieve feedback voor het testen van de robot. Omdat de Arduino Nano een kleiner geheugen heeft, konden we geen OLED-display aansluiten voor visuele feedback, daarom was het gebruik van een zoemer een alternatief.
-
knoppenpaneel – dit bestaat uit 3 programmeerbare knoppen + resetknop van de MCU. Dit knoppenpaneel heeft het mogelijk gemaakt om verschillende testprogramma ’s aan de robot toe te voegen om alle basisfuncties te controleren zonder meerdere programma’ s te uploaden.
-
1200mAh 7.4 V lithium ion batterij-met behulp van 7.4 V batterij, produceren van 5v en 6v voor de sensoren en motoren kan gemakkelijk worden gedaan met behulp van step down converters.
-
Step down converters-twee afzonderlijke step down converters werden gebruikt om 5V voor de MCU en sensoren, 6V voor de motor driver.
LM2596 module-6V stap-down convertor
b. Mini DC 5v 360 Bok Convetor-5V stap naar beneden convertor
-
HC-05 Bluetooth-Module-Voor het testen van het floodfill-algoritme hebben we een Bluetooth-module gebruikt waarmee we informatie naar een mobiele telefoon of laptop kunnen verzenden.
-
Pololu wielen 32x7mm paar – we gebruikten deze kleine wielen om de kleine vormfactor van onze robot aan te passen. kleinere wielen geven veel meer controle over de snelheid. (Verband)
we zijn eerst begonnen met een 10x10cm^2 ontwerp en zijn verhuisd naar een cirkelvormig 8x8cm^2 ontwerp waar we motoren in het midden van de robot plaatsen om de robot gemakkelijker te draaien zonder de draaias te veranderen.
er valt veel te bespreken als het gaat om het testen en programmeren van een micromuisrobot. Daarom zal de rest van de fasen worden besproken in de toekomstige artikelen in deze serie met de introductie van onze volgende robot “V V2.0” in 2019.
hier is een video van onze robot die optreedt tijdens de finale van “SLIIT Robofest 2018” wedstrijd. Ik hoop dat je iets geleerd uit mijn eerste artikel in de artikelserie van “Getting started in The micromouse journey”.
houd er altijd rekening mee dat het uniek is, start langzaam en groei met de tijd!
voeg hieronder uw suggesties en vragen toe om mijn toekomstige artikelen te verbeteren. Veel succes met het maken van je eerste micromuis robot. Dank Je!