Micromouse er egentlig ikke som noen annen robotikk konkurranse som jeg ville se. Det er en slags hobby som noen kan mestre gjennom hele livet. Starter fra grunnen av, lære fra det grunnleggende, det er lang reise å bli oppdaget. Alle de store mesterne i internasjonale micromouse-konkurranser har startet fra det aller grunnleggende. Selv om vi ser de komplekse robotene som bygges av dem nå, har de alle en suksesshistorie bak dem.
Dette er den første micromouse robot laget av «GreenYee» og hans team; all-time micromouse champion I USA og grunnleggeren Av Micromouse USA nettsted. Det handler ikke bare om å gjøre alt perfekt ved første forsøk, men det som virkelig betyr noe er forbedringen over tid.
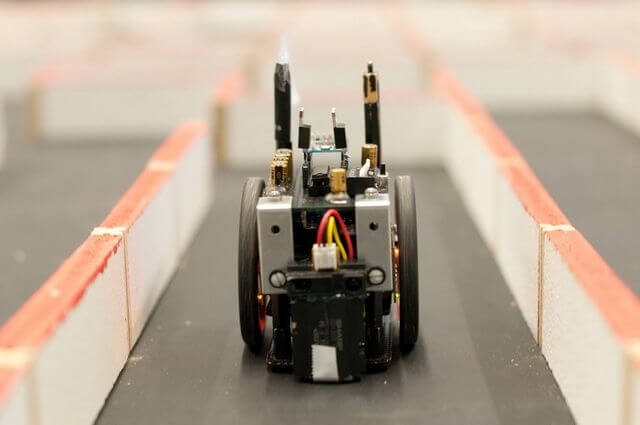
artikkelserien «komme i gang i micromouse journey» er skrevet med den hensikt å dele hvordan teamet «CircuitBreakers» startet sin reise med micromouse. I denne artikkelen vil jeg gi litt innsikt om vår første micromouse robot «වේග බට්ටා v1.0».
vi begynte å designe vår første micromouse robot tilbake i 2018 for å delta på lavere nivå av «SLIIT Robofest 2018». Etter at vi gjorde vår første forskning på å lage mikromouse, har vi innsett noen grunnleggende aspekter som skal dekkes i utgangspunktet.
- Finne god maskinvare og bygge roboten
- Implementer og test grunnleggende robotfunksjoner;
- Implementere flood fill algoritme
- Tuning og lagre den korteste banen
la oss flytte til hvert aspekt i detalj.
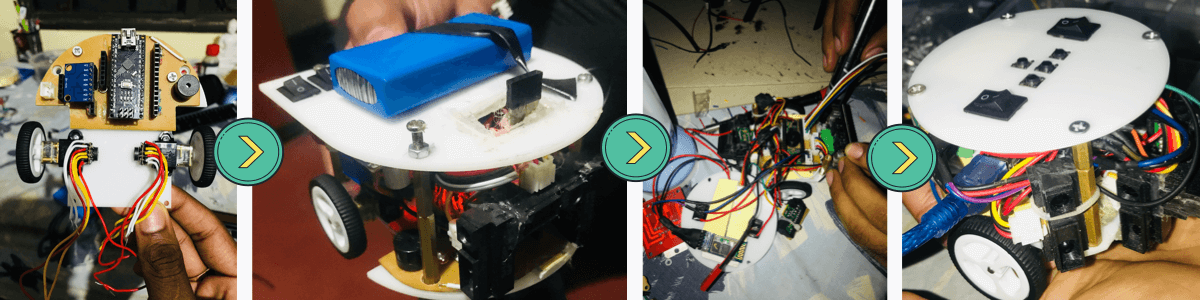
her er listen over komponenter vi har brukt til å designe roboten vår.
-
Pololu 1200rpm HPCB 6v dual shaft micro metal motors x 2 – disse motorene er små og enkle å kontrollere. Vi måtte bruke tilpasset pwm-funksjon for å kontrollere disse motorene fordi de var for raske. For V2. 0 har vi brukt en langsommere rpm av samme motor for enklere kontroll. (Lenke)
-
Pololu magnetic encoder pair kit for micro metal gear motors – disse koderne er en god løsning for å måle avstanden som roboten har reist. 12 HLR-oppløsning er rimelig for å måle avstander nøyaktig. (Lenke)
-
Arduino Nano micro controller som MCU-vi valgte Arduino plattform som et godt utgangspunkt for å lage en micromouse robot som vi var unge og uerfarne i dette feltet i begynnelsen. Med tanke på den mindre formfaktoren valgte Vi Arduino Nano som vår løsning. (Lenke)
-
Dual MC33926 Motor Driver Carrier – jeg hadde kjøpt denne motoren driver tidligere. Derfor brukte jeg dette til micromouse-roboten. Enhver god kvalitet, lav effekt motor kontrolleren kan brukes. Men vær oppmerksom når Du bruker L29xx motorkontrollere av lav kvalitet, da robotens respons kan bli påvirket av den. (Lenke)
-
MPU6050 Module-Dette er en oppføring utvalg gyroskop som vil suite for typer alle robotikk applikasjoner. Annet enn å være svært kostnadseffektiv, har denne gyro noen svært unike funksjoner som andre høyere priset moduler mangler som jeg planlegger å dekke i en annen artikkel i fremtiden. (Lenke)
-
Skarpe IR-avstandssensorer-disse sensorene kan gi nøyaktige avstandsmålinger, selv om overflaten er vinklet og ikke påvirkes av miljøet, objektfargen eller overflaten.
a. 4-30cm Avstandssensor-disse sensorene ble brukt til å måle avstanden til veggene foran og justere roboten riktig før en sving (Lenke)
b. 2-15cm Avstandssensor – disse sensorene ble brukt til å måle avstanden til veggene og justere roboten parallelt med veggene i labyrinten (Lenke)
-
5V Buzzer-Dette kom til nytte som et feilsøkingssignal der vi brukte som en auditiv tilbakemelding for å teste roboten. Siden Arduino Nano har et mindre minne, kunne VI ikke koble TIL EN OLED-skjerm for visuell tilbakemelding, derfor var det et alternativ å bruke en summer.
-
Button Panel-dette består av 3 programmerbare knapper + reset-knappen PÅ MCU. Dette knappepanelet har aktivert å inkludere flere testprogrammer til roboten for å sjekke alle grunnleggende funksjoner uten å laste opp flere programmer.
-
1200mAh 7.4 V litium ion batteri-Ved hjelp av 7.4 v batteri, produsere 5v og 6v for sensorer og motorer kan enkelt gjøres ved hjelp av trinn ned omformere.
-
Trinn ned omformere-To separate trinn ned omformere ble brukt TIL å gi 5V FOR MCU og sensorer, 6V for motordriveren.
a. LM2596 Modul – 6v trinn ned omformer
b. Mini DC 5V 360 Buck Convetor-5v trinn ned omformer
-
Hc-05 Bluetooth Module – for testing av floodfill-algoritmen har vi brukt En Bluetooth-modul der vi kan sende informasjon til en mobiltelefon eller bærbar pc.
-
Pololu wheels 32x7mm Pair – vi brukte disse små hjulene til å passe den lille formfaktoren til roboten vår. mindre hjul gir mye mer kontroll over hastigheten. (Lenke)
Vi har først startet med en 10x10cm^2-design og flyttet til en sirkulær 8x8cm^2-design der vi plasserte motorer midt i roboten for lettere å dreie roboten uten å endre vendeaksen.
Det er mye å diskutere når det gjelder testing og programmering av en micromouse robot. Derfor vil resten av etappene bli diskutert i fremtiden artikler i denne serien med innføringen av vår neste robot «වේග බට්ටා v2. 0» i 2019.
her er en video av roboten vår som utfører på finalen i» SLIIT Robofest 2018 » – konkurransen. Håper du lærte noe ut av min første artikkel i artikkelserien «Komme i gang i micromouse journey».
husk alltid å være unik, start sakte og vokse med tiden!
vennligst legg til dine forslag og spørsmål nedenfor for å forbedre mine fremtidige artikler. Lykke til med å lage din første micromouse robot. Thank You!