マイクロマウスは、私が見るように、他のロボット工学の競争のように本当にではありません。 それは誰かが彼/彼女の人生を通して習得することができる趣味のようなものです。 ゼロから始まり、基礎から学ぶことで、発見される長い旅があります。 国際的なマイクロマウス競技の偉大なチャンピオンのすべては、非常に基本から始まっています。 複雑なロボットが今彼らによって構築されているのを見ても、彼らはすべて彼らの背後にあるサクセスストーリーを持っています。
これは、”GreenYee”と彼のチームによって作られた最初のマイクロマウスロボットです。 最初の試行ですべてを完璧にすることはすべてではありませんが、本当に重要なのは時間の経過とともに改善することです。
“マイクロマウスの旅で始める”の記事シリーズは、チーム”CircuitBreakers”がマイクロマウスの旅を始めた方法を共有することを意図して書かれています。 この特定の記事では、私は私たちの最初のマイクロマウスロボット”වේග බට්ටාv1.0″についてのいくつかの洞察を提供します。
私たちは2018年に”SLIIT Robofest2018″の学部レベルに参加するために最初のマイクロマウスロボットの設計を開始しました。 私達がマイクロマウスの作成の私達の最初の研究をした後、私達は最初にカバーされるべきある基本的な面を実現しました。
- 良いハードウェアを見つけてロボットを構築
- 基本的なロボット機能の実装とテスト; セルの回転、移動など
- フラッドフィルアルゴリズムの実装
- 最短パスのチューニングと保存
各側面に詳細に移動しましょう。
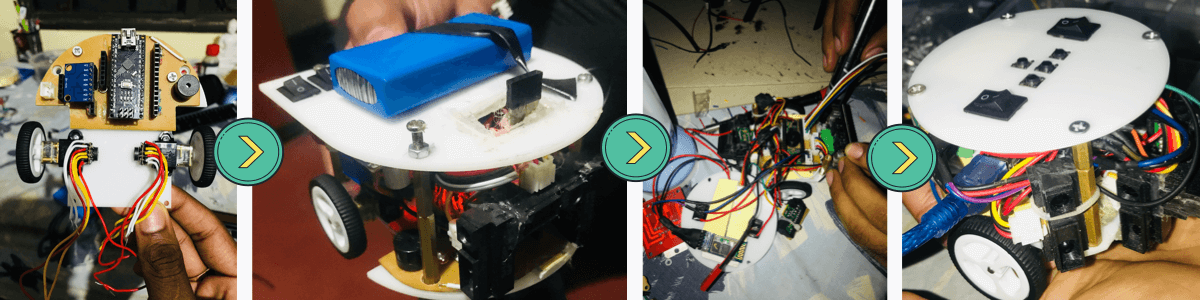
ここでは、ロボットの設計に使用したコンポーネントのリストです。
-
Pololu1200rpm HPCB6Vの二重シャフトのマイクロ金属モーター x2-これらのモーターは小さく、制御し易い。 これらのモーターは速すぎたため、カスタムpwm機能を使用して制御しなければなりませんでした。 V2.0のために私達はより容易な制御のために同じモーターのより遅いrpmを使用した。 (リンク)
-
Pololuのマイクロメタルギアモーターのための磁気エンコーダーの組のキット–これらのエンコーダーはロボットによって移動される間隔を測定するよい解決で 12CPRの決断は間隔を正確に測定して適度です。 (リンク)
-
MCUとしてのArduino Nano micro controller-私たちは、最初はこの分野で若くて未経験だったので、マイクロマウスロボットを作るための良い出発点としてArduinoプラットフォームを選 より小さい形式要素を考慮して私達は私達の解決としてArduino Nanoを選びました。 (リンク)
-
デュアルMC33926モータードライバキャリア–私は以前にこのモータードライバを購入していました。 そこで、私はこれをマイクロマウスロボットに使用しました。 どの良質でも、低い電力モーター制御装置使用することができます。 しかし、低品質のL29Xxモーターコントローラを使用する場合は、ロボットの応答性が影響を受ける可能性があるため注意してください。 (リンク)
-
MPU6050モジュール–これはタイプのための続きすべてのロボット工学の適用記入項目の範囲のジャイロスコープである。 非常に費用対効果の高いこと以外に、このジャイロは、私が将来的に別の記事でカバーすることを計画している他の高価格のモジュールが欠けているい (リンク)
-
鋭いIRの間隔センサー-これらのセンサーは表面が角度を付けられ、環境、目的色または表面によって影響されない正確な間隔の測定を提供できる。
a.4–30cm距離センサー-これらのセンサーは、前方の壁までの距離を測定し、ターン前にロボットを正しく整列させるために使用されました(リンク)
b。 2-15cm距離センサー-これらのセンサーは、壁までの距離を測定し、迷路の壁にロボットを平行に整列させるために使用されました(リンク)
-
5Vブザー-これは、ロボットをテストするための聴覚フィードバックとして使用されるデバッグ信号として便利でした。 Arduino Nanoはメモリが小さいため、視覚的なフィードバックのためにOLEDディスプレイを接続することができなかったため、ブザーを使用することが代替でした。
-
ボタンのパネル–これはMCUの3つのプログラム可能なボタン+リセットボタンから成っています。 このボタンのパネルは複数のプログラムをアップロードしないですべての基本的な機能を点検するためにロボットに複数のテストプロ
-
1200mah7.4Vリチウムイオン電池–7.4v電池を使用して、センサーおよびモーターのための5vおよび6vを作り出すことはステップダウンコンバーターを使
-
ステップダウンコンバータ-二つの別々のステップダウンコンバータは、MCUとセンサのための5V、モータドライバのための6Vを提供するために使用され
A.LM2596モジュール-6Vステップダウンコンバータ
b. ミニDC5v360Buck Convetor-5vステップダウンコンバータ
-
HC–05Bluetoothモジュール-floodfillのアルゴリズムをテストするために、私達は私達が携帯電話かラップトップに情報を送ってもいいBluetoothモジュールを使用しました。
-
Pololuの車輪32x7mmの組-私達は続きにこれらの小さい車輪を私達のロボットの小さい形式要素使用した。 より小さい車輪は速度の大いにより多くの制御を与える。 (リンク)
最初は10x10cm^2の設計から始まり、回転軸を変えずにロボットを簡単に回転させるためにロボットの中央にモーターを配置した円形の8x8cm^2の設計に移動しました。
マイクロマウスロボットのテストとプログラミングに関しては、議論することがたくさんあります。 したがって、残りの段階については、2019年に次のロボット「වේග බට්ටාv2.0」を導入して、このシリーズの将来の記事で説明します。
“SLIIT Robofest2018″コンペティションの決勝戦に出場したロボットのビデオです。 あなたが”マイクロマウスの旅で始める”の記事シリーズの私の最初の記事から何かを学んだことを願っています。
常にユニークであることを念頭に置いて、ゆっくりと開始し、時間とともに成長!
私の将来の記事を改善するために、以下の提案や質問を追加してください。 あなたの最初のマイクロマウスのロボットを作る幸運。 ありがとうございました!