Vous êtes-vous déjà demandé comment un Capteur de Proximité Inductif est capable de détecter la présence d’une cible métallique? Bien que l’ingénierie électrique sous-jacente soit sophistiquée, le principe de fonctionnement de base n’est pas trop difficile à comprendre.
Au cœur d’un Capteur de Proximité Inductif (« prox » « capteur » ou « capteur prox » pour faire court) se trouve un oscillateur électronique constitué d’une bobine inductive constituée de nombreux spires de fil de cuivre très fin, d’un condensateur pour stocker la charge électrique et d’une source d’énergie pour fournir une excitation électrique. La taille de la bobine inductive et du condensateur sont adaptées pour produire une oscillation d’onde sinusoïdale auto-entretenue à une fréquence fixe. La bobine et le condensateur agissent comme deux ressorts électriques avec un poids suspendu entre eux, poussant constamment les électrons d’avant en arrière entre eux. L’énergie électrique est introduite dans le circuit pour initier et maintenir l’oscillation. Sans maintenir l’énergie, l’oscillation s’effondrerait en raison des faibles pertes de puissance de la résistance électrique du fil de cuivre mince dans la bobine et d’autres pertes parasites.
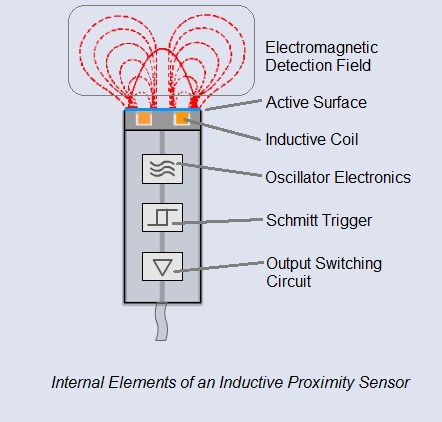
L’oscillation produit un champ électromagnétique devant le capteur, car la bobine est située juste derrière la « face » du capteur. Le nom technique de la face du capteur est « surface active ».
Lorsqu’un morceau de métal conducteur pénètre dans la zone définie par les limites du champ électromagnétique, une partie de l’énergie d’oscillation est transférée dans le métal de la cible. Cette énergie transférée apparaît sous la forme de minuscules courants électriques en circulation appelés courants de Foucault. C’est pourquoi les proxes inductifs sont parfois appelés capteurs à courants de Foucault.
Les courants de Foucault qui s’écoulent rencontrent une résistance électrique lorsqu’ils essaient de circuler. Cela crée une petite perte de puissance sous forme de chaleur (tout comme un petit radiateur électrique). La perte de puissance n’est pas entièrement remplacée par la source d’énergie interne du capteur, de sorte que l’amplitude (le niveau ou l’intensité) de l’oscillation du capteur diminue. Finalement, l’oscillation diminue au point qu’un autre circuit interne appelé déclencheur de Schmitt détecte que le niveau est tombé en dessous d’un seuil prédéterminé. 
 Ce seuil est le niveau où la présence d’une cible métallique est définitivement confirmée. Lors de la détection de la cible par le déclencheur de Schmitt, la sortie du capteur est activée.
Ce seuil est le niveau où la présence d’une cible métallique est définitivement confirmée. Lors de la détection de la cible par le déclencheur de Schmitt, la sortie du capteur est activée.
La courte animation à droite montre l’effet d’une cible métallique sur le champ magnétique oscillant du capteur. Lorsque vous voyez le câble sortant du capteur devenir rouge, cela signifie que du métal a été détecté et que le capteur a été allumé. Lorsque la cible s’en va, vous pouvez voir que l’oscillation revient à son niveau maximum et que la sortie du capteur est désactivée.
Vous souhaitez en savoir plus sur les principes de fonctionnement de base des capteurs de proximité inductifs ? Voici une courte vidéo YouTube couvrant les bases:
