¿Alguna vez se ha preguntado cómo un Sensor de Proximidad Inductivo es capaz de detectar la presencia de un objetivo metálico? Si bien la ingeniería eléctrica subyacente es sofisticada, el principio básico de funcionamiento no es demasiado difícil de entender.
En el corazón de un sensor de Proximidad Inductivo («sensor «prox o» sensor prox «para abreviar) hay un oscilador electrónico que consiste en una bobina inductiva hecha de numerosas vueltas de alambre de cobre muy fino, un condensador para almacenar carga eléctrica y una fuente de energía para proporcionar excitación eléctrica. El tamaño de la bobina inductiva y el condensador se combinan para producir una oscilación de onda sinusoidal autosostenible a una frecuencia fija. La bobina y el condensador actúan como dos resortes eléctricos con un peso colgado entre ellos, empujando constantemente electrones de un lado a otro. La energía eléctrica se introduce en el circuito para iniciar y mantener la oscilación. Sin mantener la energía, la oscilación colapsaría debido a las pequeñas pérdidas de potencia de la resistencia eléctrica del alambre de cobre delgado en la bobina y otras pérdidas parasitarias.
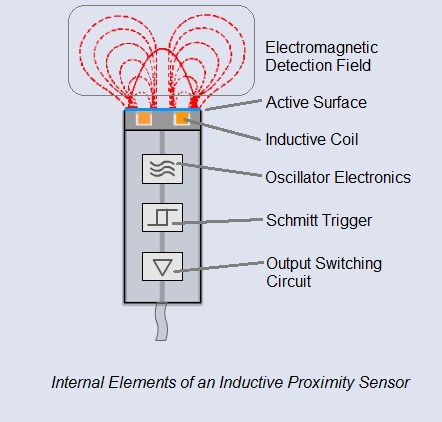
La oscilación produce un campo electromagnético delante del sensor, porque la bobina se encuentra justo detrás de la» cara » del sensor. El nombre técnico de la cara del sensor es «superficie activa».
Cuando una pieza de metal conductor entra en la zona definida por los límites del campo electromagnético, parte de la energía de oscilación se transfiere al metal del objetivo. Esta energía transferida aparece como pequeñas corrientes eléctricas circulantes llamadas corrientes de foucault. Esta es la razón por la que los proxes inductivos a veces se llaman sensores de corrientes de foucault.
Las corrientes de foucault que fluyen encuentran resistencia eléctrica a medida que intentan circular. Esto crea una pequeña pérdida de energía en forma de calor (al igual que un pequeño calentador eléctrico). La pérdida de potencia no se reemplaza por completo por la fuente de energía interna del sensor, por lo que la amplitud (el nivel o la intensidad) de la oscilación del sensor disminuye. Eventualmente, la oscilación disminuye hasta el punto de que otro circuito interno llamado Disparador Schmitt detecta que el nivel ha caído por debajo de un umbral predeterminado. 
 Este umbral es el nivel donde se confirma definitivamente la presencia de un objetivo de metal. Tras la detección del objetivo por el disparador Schmitt, la salida del sensor se enciende.
Este umbral es el nivel donde se confirma definitivamente la presencia de un objetivo de metal. Tras la detección del objetivo por el disparador Schmitt, la salida del sensor se enciende.
La animación corta a la derecha muestra el efecto de un objetivo metálico en el campo magnético oscilante del sensor. Cuando vea que el cable que sale del sensor se vuelve rojo, significa que se detectó metal y que el sensor se encendió. Cuando el objetivo desaparece, puede ver que la oscilación vuelve a su nivel máximo y la salida del sensor se apaga de nuevo.
¿Desea obtener más información sobre los principios básicos de funcionamiento de los Sensores de proximidad Inductivos? Aquí hay un breve video de YouTube que cubre lo básico:
