Ein Regler ist ein System, mit dem die mittlere Drehzahl eines Motors unter schwankenden Lastbedingungen innerhalb bestimmter Grenzen gehalten wird. Dies geschieht durch Regulieren und Steuern der dem Motor zugeführten Kraftstoffmenge. Der Regler begrenzt somit die Drehzahl des Motors, wenn er im Leerlauf läuft, d. h. er regelt die Leerlaufdrehzahl und stellt sicher, dass die Motordrehzahl den vom Hersteller angegebenen Maximalwert nicht überschreitet.
Alle Schiffe benötigen ein Geschwindigkeitsregelungssystem, um die Geschwindigkeit der an Bord verwendeten Antriebsanlage zu steuern und zu regeln, da bei der Motorlast eine große Anzahl von Variationen auftreten kann, die den Motor beschädigen und zum Verlust von Leben und Ausrüstung führen können. Die Schwankungen der Belastung des Motors können auf verschiedene Faktoren zurückzuführen sein, wie z. B. raue See, Rollen und Nicken des Schiffes, beeinträchtigte Schiffsstruktur, Gewichtsänderungen des Schiffes und andere.
Regler sind auch in Hilfsdieselmotoren oder Generatoren und Generatoren auf dem Schiff eingebaut.
Related Read: Überdrehzahl in Dieselmotoren & Arten von Überdrehzahlfahrten
- Klassifizierung von Reglern auf der Grundlage von Design und Konstruktion
- Vorteile mechanischer Regler
- Hydraulische Regler
- Elektrohydraulische Regler
- Klassifizierung der Regler nach ihren Funktionsprinzipien
- Hydraulische Steuerung
- Gouverneur empfindlichkeit
- Elektronische System
- Wartung von Gouverneure
- Was ist Droop?
- Was ist die verwendung der speeder frühling?
- Was ist Deadband?
- Was ist Jagd?
Klassifizierung von Reglern auf der Grundlage von Design und Konstruktion
Diese Regler bestehen aus gewichteten Kugeln oder Fliegengewichten, die eine Zentrifugalkraft erfahren, wenn sie durch die Wirkung der Motorkurbelwelle gedreht werden. Diese Zentrifugalkraft wirkt als Regelkraft und dient zur Regelung des dem Motor zugeführten Kraftstoffs über einen Drosselmechanismus, der direkt mit den Einspritzgestellen verbunden ist. Diese Gewichtsanordnungen sind klein und daher reicht die erzeugte Kraft nicht aus, um die Einspritzpumpen großer Motoren zu steuern. Sie können dort eingesetzt werden, wo keine exakte Drehzahlregelung erforderlich ist. Sie haben eine große Totzone und eine geringe Ausgangsleistung.
Verwandte Artikel: Heizölverbrauchsberechnungen für Schiffe: Was Seeleute wissen sollten
Vorteile mechanischer Regler
1. Sie sind billig.
2. Sie können verwendet werden, wenn es nicht notwendig ist, eine genaue Geschwindigkeit abhängig von der Last beizubehalten.
3. Sie sind einfach im Aufbau und haben nur wenige Teile.
Hydraulische Regler
Bei hydraulischen Reglern ist die gewichtete Baugruppe mit einem Steuerventil verbunden und nicht direkt mit dem Kraftstoffregelventil, wie dies bei einem mechanischen Regler der Fall ist. Dieses Ventil ist für die Leitung von Hydraulikflüssigkeit verantwortlich, die den Kraftstofffluss und damit die Leistung oder Drehzahl eines Motors steuert. Es kann eine größere Kraft erzeugt werden, und diese Regler finden Anwendung in mittleren bis großen Motoren. Heutzutage verwenden die meisten Schiffe hydraulische Regler und werden mit elektronischen Steuerungen nachgerüstet.
Vor- und Nachteile von Hydraulikreglern
1. Sie haben eine hohe Ausgangsleistung,
2. Sie haben eine hohe Genauigkeit und Präzision
3. Sie haben einen hohen Wirkungsgrad
4. Die Wartung von Hydraulikreglern ist einfach
Elektrohydraulische Regler
Diese Arten von Reglern haben einen Aktuator mit zwei Abschnitten – einem mechanischen Hydraulikregler und einem elektrischen Regler. Im Falle eines Ausfalls des elektrischen Reglers kann das Gerät manuell gesteuert werden, auf dem mechanisch-hydraulischen Backup-Gouverneur. Der mechanische Gouverneur wird auf eine Geschwindigkeit eingestellt, die höher ist, als das bewertete sped, die Geschwindigkeit und die Last des gesamten Systems durch den elektrischen Gouverneur gesteuert werden. Das System verfügt über ein elektronisches Steuerventil, das in einem elektromagnetischen Feld mit dem Anker verbunden ist.
Ein ECB (Electronic Control Box) sendet ein Signal an das Feld, das den Anker und damit das Steuerventil positioniert, das die Kraftstoffzufuhr regelt. Die elektrische Steuerung überschreibt den mechanisch-hydraulischen Modus, wenn das System auf den elektronischen Betrieb eingestellt ist.
Related Read: 10 Punkte, die beim Umgang mit elektromechanischen Reglern von Schiffsmotoren zu beachten sind
Vorteile von elektronischen Reglern
1. Schnellere Reaktion auf Lastwechsel
2. Steuerfunktionen können einfach in die Regler
3 eingebaut werden. Vorhandensein von Indikatoren und Kontrollen haben Automatisierung implementiert
4. Sie können an vom Motor entfernten Positionen montiert werden und eliminieren oder reduzieren den Bedarf an Reglerantrieben
Klassifizierung der Regler nach ihren Funktionsprinzipien
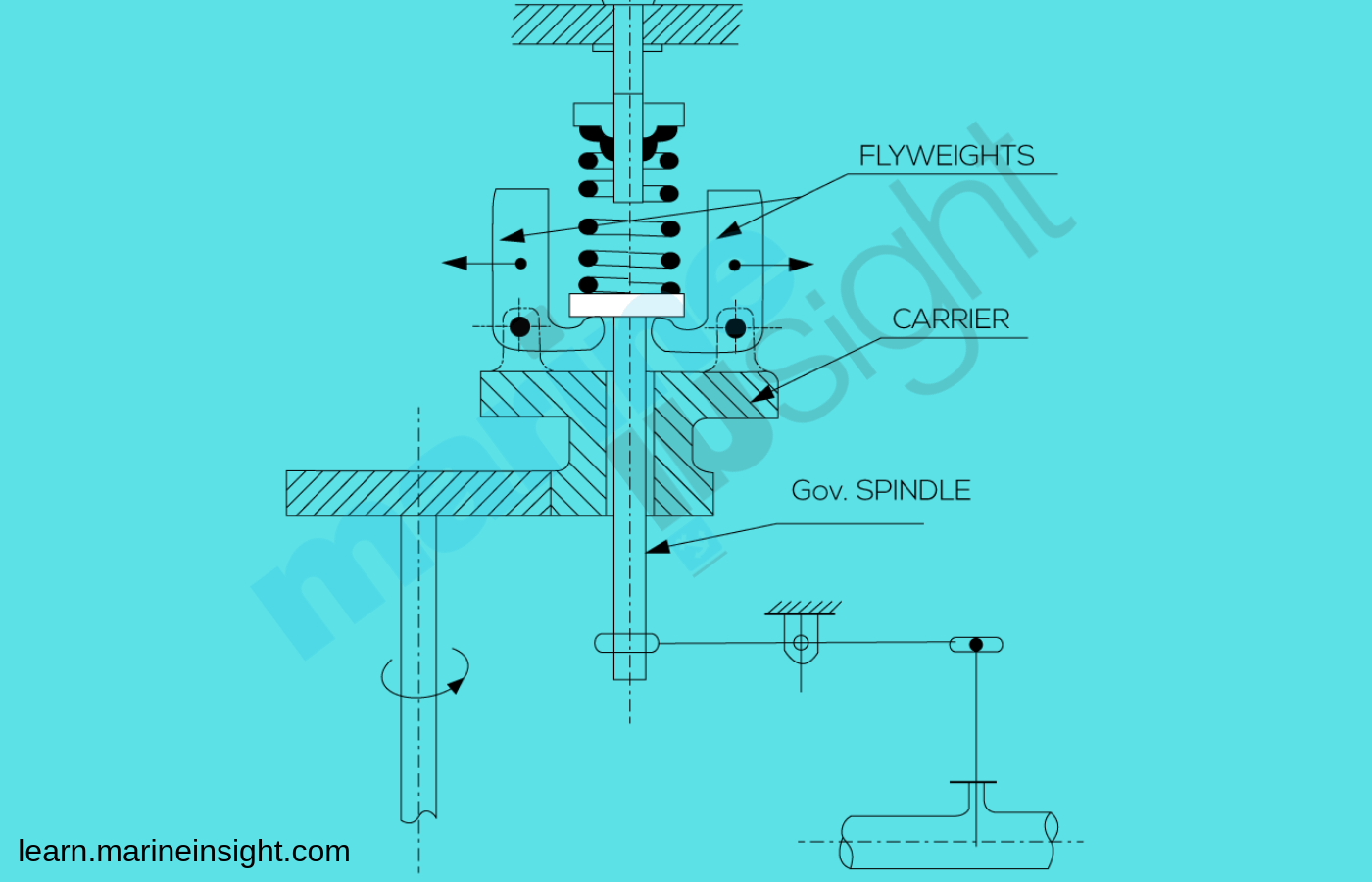
Fast alle Arten von Reglern sind mit einer Fliegengewichtsbaugruppe ausgestattet. Zwei oder vier Fliegengewichte sind auf einem rotierenden Kugelkopf montiert, der über ein Getriebe direkt von der Motorwelle angetrieben wird. Die Drehung der Kugelköpfe erzeugt eine Zentrifugalkraft, die auf die Fliegengewichte der Baugruppe einwirkt und bewirkt, dass sie sich von ihrer Drehachse weg nach außen bewegen. Da die Drehzahl erhöht wird und der Grad der Bewegung der Fliegengewichte nach außen ebenfalls zunimmt, und umgekehrt, hängt die Bewegung der Fliegengewichte von der Motordrehzahl ab.
Eine Feder wirkt der Fliehkraft der Fliegengewichte entgegen und zwingt sie in ihre Ausgangsposition. Diese Feder ist als Speederfeder bekannt. Die Position der Fliegengewichte und ihre Bewegung nach außen wird auf eine Spindel übertragen (dies kann durch einen Kragen erfolgen), die sich hin- und herbewegen kann. Die Bewegung dieser Spindel, die die Steuerhülse bildet, betätigt ein Gestänge zur Kraftstoffpumpensteuerung und steuert letztlich die eingespritzte Kraftstoffmenge.
Unter normalen Betriebsbedingungen, d. H. konstanter Geschwindigkeit und Belastung, bleibt die Steuerhülse stationär, da die Kraft auf die Fliegengewichte durch die von der Speederfeder ausgeübte Gegenkraft ausgeglichen wird.
Wenn die Belastung des Motors erhöht wird, verringert sich die Drehzahl des Motors und die Steuerhülse bewegt sich nach unten, da die von der Speederfeder auf sie ausgeübte Kraft die von den Fliegengewichten ausgeübte Kraft überwindet.
Die Abwärtsbewegung der Hülse ist mit dem Kraftstoffregelventil derart verknüpft, dass es zu einer Erhöhung der Kraftstoffförderung und damit der vom Motor erzeugten Leistung kommt. Die Kraft auf die Fliegengewichte nimmt mit der Motordrehzahl zu und das System kommt wieder ins Gleichgewicht.
Wenn die Belastung des Motors abnimmt, erhöht sich seine Drehzahl. Die Fliegengewichte bewegen sich nach außen und die Steuerhülse bewegt sich wiederum nach oben, wenn die Zentrifugalkraft die Speederfederkraft überwindet. Die Bewegung der Hülse betätigt die Kraftstoffpumpe, die Kraftstoffförderung wird abgesenkt, wodurch die Drehzahl des Motors verringert wird und das System ins Gleichgewicht kommt.
Hydraulische Steuerung
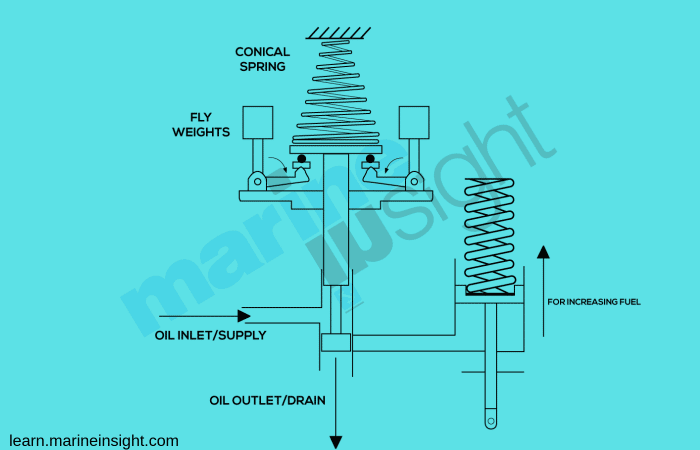
In diesem Fall sind die Fliegengewichte hydraulisch mit der Kraftstoffsteuereinheit verbunden. Dieses System besteht aus einem Vorsteuerventil, das mit der Reglerspindel und einem Kolben verbunden ist. Der Kolben ist als Arbeitskolben bekannt und steuert die dem Motor zugeführte Kraftstoffmenge. Es wird von der Kraft einer Feder und der Hydraulikflüssigkeit auf gegenüberliegenden Seiten beaufschlagt. Die Ölmenge im System und anschließend der hydraulische Druck auf den Kolben wird durch das Pilotventil geregelt, das letztendlich von der Fliegengewichtsbaugruppe gesteuert wird.
Die Steuerventilhülse ist unten offen, wo sich in der Unterseite des Reglergehäuses eine Ölwanne befindet. Eine Zahnradpumpe, die dem System Hochdruckhydrauliköl zuführt, saugt aus der Ölwanne an. Es wird von der Gouverneurantriebswelle angetrieben. Ein federbelasteter Speicher ist vorhanden, der den erforderlichen Öldruck aufrechterhält und das Ablassen von überschüssigem Öl zurück in den Sumpf ermöglicht.
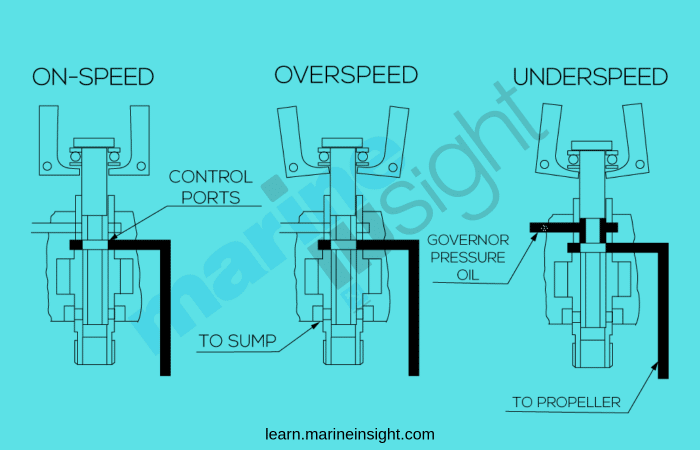
Bei konstantem Drehzahl- und Lastbetrieb ist das Ventil so positioniert, dass es die Anschlüsse in der Ventilhülse und damit den Durchgang von Öl zum Arbeitskolben blockiert, der unter den ausgeglichenen Kräften stationär bleibt.
Eine Erhöhung der Last verringert die Motordrehzahl. In diesem Fall bewegen sich die Fliegengewichte nach innen und die Reglerspindel bewegt sich unter der Wirkung der Kraft der Speederfeder nach unten. Diese Bewegung senkt das Vorsteuerventil, das Öl zur Unterseite des Arbeitskolbens leitet.
Wenn der hydraulische Druck auf den Kolben die auf ihn wirkende Federkraft überwindet, bewegt sich der Kolben nach oben und die Kraftstoffzufuhr zum Systemmotor wird erhöht. daher erhöht sich seine Geschwindigkeit. Sobald die Drehzahl des Motors ansteigt, steigt das Steuerventil in seine Ausgangsstellung zurück, die die Zufuhr von Hydraulikflüssigkeit zum Arbeitskolben blockiert.
Andererseits bewirkt die Auswärtsbewegung der Fliegengewichte unter der Wirkung der zusätzlichen Zentrifugalkraft bei abnehmender Belastung des Motors und zunehmender Drehzahl eine nachfolgende Aufwärtsbewegung der Spindel und damit auch des Vorsteuerventils. Dadurch wird der Anschluss geöffnet, so dass das Hydrauliköl im System unter dem Arbeitskolben durch einen Entwässerungskanal zur Ölwanne fließt. Der Arbeitskolben bewegt sich dann unter der Wirkung der Federkraft nach unten und reduziert den Hydraulikdruck und verringert somit die dem Motor zugeführte Kraftstoffmenge. Dies reduziert die Motordrehzahl und folglich werden die Kräfte auf die Fliegengewichte wieder ausgeglichen.
Verwandte Lesen: Marine Motor Operationen–Starten, Laufen, Stoppen
Gouverneur empfindlichkeit
Zu erhöhen die empfindlichkeit der gouverneur und zu verhindern über korrektur durch die system, eine kompensation mechanismus ist integriert in die gouverneur design. Im Falle eines hydraulischen Reglers ist ein Stößel an der Kraftkolbenwelle und an der Antriebswelle vorhanden. Diese sind als Betätigungsausgleichsstößel bzw. als Aufnahmeausgleichsstößel bekannt.
Der Ausgleichskolben bewegt sich in einem Zylinder, der mit der Hydraulikflüssigkeit gefüllt ist. Dieser Kolben bewegt sich in die gleiche Richtung wie der Arbeitskolben. Die Abwärtsbewegung des Arbeitskolbens aufgrund einer Erhöhung der Motordrehzahl bewegt auch den Ausgleichskolben nach unten. Dadurch zieht der Kolben Öl aus einem unterhalb der Vorsteuerventilbuchse vorhandenen Zylinder. Dadurch entsteht ein Sog oberhalb des aufnehmenden Ausgleichskolbens, der ein Teil der Buchse ist. Die Buchse bewegt sich nach oben und schließt den Anschluss zum Arbeitskolben.
Somit ist der Pilotventilanschluss gerade lange genug geöffnet, so dass die Motordrehzahl auf die eingestellte Geschwindigkeit zurückkehrt und eine Überkorrektur vermieden wird. Wenn die Fliegengewichte und das Vorsteuerventil in ihre zentrale Position zurückkehren, ermöglicht das durch das Nadelventil fließende Öl, dass auch die Vorsteuerventilbuchse ihre zentrale Position erreicht.
Die Buchse und der Kolben müssen mit der gleichen Geschwindigkeit absenken, um den Anschluss geschlossen zu halten. Dies hängt von den Motoranforderungen des Herstellers ab. Bei einer Abnahme der Motordrehzahl bewegt sich der Betätigungsausgleichsstößel nach oben und der Druck auf den Aufnahmeausgleichsstößel wird erhöht. Es bewegt sich mit der Pilotventilbuchse nach oben.
Der zum Leistungszylinder führende Anschluss bleibt geschlossen und das überschüssige Öl wird durch das Nadelventil abgelassen. Anschließend wird die Buchse wieder in ihre Mittelstellung gebracht.
Elektronische System
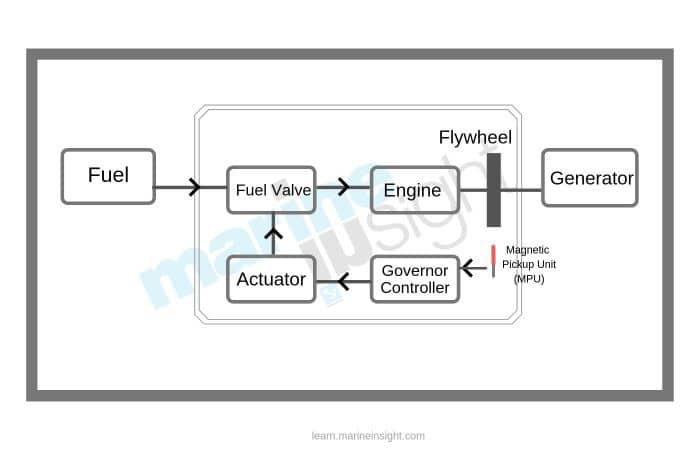
EINE Elektronische gouverneur bietet motor geschwindigkeit einstellung von keine-last zustand zu volllast. Es besteht aus einem Regler, einem elektromagnetischen Aufnehmer (MPU) und einem Aktuator (ACT), um die notwendige Drehzahlregelung und -regelung durchzuführen. Die MPU ist ein Mikrogenerator und hat ein Magnetfeld. Es besteht aus einem Permanentmagneten mit einer externen Spulenwicklung. Wie im Diagramm gezeigt, ist die MPU über den Schwungradzähnen installiert und abhängig von ihrem Abstand von den Zahnradzähnen oder dem Schlitz variiert das Magnetfeld der MPU von einem Maximum zu einem Minimum.
Aufgrund des sich ständig ändernden inneren Magnetfeldes wird in der äußeren Leitspule eine Wechselspannung und -frequenz erzeugt. Diese Wechselspannung folgt der Drehzahl des Schwungrades. Dies ist der wichtigste Aspekt des elektronischen Steuerungssystems, da die Reglersteuerung die erhaltene Frequenz in ein Gleichspannungssignal umwandelt. Es vergleicht dies dann mit einer eingestellten Spannung. Die Ergebnisse werden durch eine PID-Regelung (Proportional-Integral-Differential) berechnet und schließlich erreicht der Ausgang den Aktuator, der die erforderlichen Korrekturen an der Kraftstoffversorgung des Motors durchführt.
Related Read: Wie synchronisiere ich Generatoren auf einem Schiff?
Die elektronische Steuerung verfügt über verschiedene Betriebsarten, um verschiedene Funktionen zu implementieren. Dazu gehören;
1. Erfassen des Startens eines Motors und anschließende Steuerung der Kraftstoffzufuhr.
2. Unterdrückung des vom Motor erzeugten Rauchs bei steigender Drehzahl.
3. Einstellen der droop Prozentsatz. Eine detaillierte Erklärung des Droop-Prozentsatzes finden Sie unten.
4. Fernbedienung geschwindigkeit control.
5. Leerlaufdrehzahl betrieb: Es bietet feste drehzahlregelung über die gesamte drehmoment kapazität der motor.
6. Maximale geschwindigkeit control: Es ist verwendet zu beseitigen über beschleunigung der motor
Wartung von Gouverneure
- Die gouverneur sollte immer sauber gehalten werden und es sollte frei von schmutzig schmieröl.
- Das System sollte regelmäßig mit dem richtigen Schmieröl gespült werden.
- Die Hydraulikflüssigkeit und das Schmieröl sollten die vom Hersteller vorgeschriebene Viskosität haben.
- Der Ölstand des Systems sollte aufrechterhalten und überprüft werden.
- Der Regler darf nicht manipuliert werden, und die Reparaturen und der Betrieb sollten nur von erfahrenen Bedienern durchgeführt werden.
Was ist Droop?
Wenn die Belastung des Motors zunimmt, wird die Kraftstoffzufuhr zum Motor erhöht und dennoch darf er mit einer proportional niedrigeren Drehzahl laufen. Dieses Merkmal eines Regierungssystems wird als Droop bezeichnet. Wenn mehr als ein Antriebsaggregat an dieselbe Welle angeschlossen ist, wie bei der Erzeugung elektrischer Energie, ermöglicht Droop eine stabile Lastverteilung zwischen ihnen.
Die Antriebsmaschine kann im Droop-Speed-Control-Modus betrieben werden, wobei ihre Laufgeschwindigkeit als Prozentsatz der tatsächlichen Geschwindigkeit eingestellt wird. Wenn die Last des Generators von Leerlauf auf Volllast erhöht wird, nimmt die tatsächliche Drehzahl des Motors (Antriebsmaschine) tendenziell ab. Um die Leistung in diesem Modus zu erhöhen, wird die Referenzdrehzahl der Antriebsmaschine erhöht und damit der Durchfluss von Arbeitsfluid (Kraftstoff) zur Antriebsmaschine erhöht. Es wird als Prozentsatz gemäß der Formel gemessen;
Droop% = (Leerlaufdrehzahl – Volllastdrehzahl) / Leerlaufdrehzahl
Was ist die verwendung der speeder frühling?
Die Regeldrehzahl des Motors wird durch Ändern der Spannung der Geschwindigkeitseinstellfeder eingestellt, die auch als Speederfeder bezeichnet wird. Die Spannung der Feder wirkt der vom Schwungrad auf die Spindel ausgeübten Kraft entgegen. Der Druck der Feder bestimmt die Drehzahl des Motors, die erforderlich ist, damit die Fliegengewichte ihre zentrale Position beibehalten können.
Was ist Deadband?
Die Totzone eines Reglers gibt den Drehzahlbereich an, nach dem der Regler in Betrieb geht, um Korrektureinstellungen vorzunehmen. Innerhalb dieses Bereichs arbeitet der Regler überhaupt nicht. Die Breite der Totzone ist umgekehrt proportional zur Empfindlichkeit des Reglers.
Was ist Jagd?
Die kontinuierliche Schwankung der Motordrehzahl um die mittlere erforderliche Drehzahl wird als Jagd bezeichnet. Dies geschieht, wenn der Regler zu empfindlich ist und die Kraftstoffzufuhr selbst bei einer kleinen Änderung der Motordrehzahl ändert. Es liefert entweder zu viel Kraftstoff oder zu wenig Kraftstoff und die Reglerhülse bewegt sich wiederholt in ihre höchste Position. Dieser Zyklus setzt sich unbegrenzt fort und der Motor soll jagen.
Haftungsausschluss: Die in diesem Artikel geäußerten Ansichten der Autoren spiegeln nicht unbedingt die Ansichten von Marine Insight wider. Daten und Diagramme, falls verwendet, In dem Artikel stammen aus verfügbaren Informationen und wurden von keiner gesetzlichen Behörde authentifiziert. Der Autor und Marine Insight erheben keinen Anspruch auf Richtigkeit und übernehmen keine Verantwortung dafür. Die Ansichten stellen nur die Meinungen dar und stellen keine Richtlinien oder Empfehlungen für eine vom Leser zu befolgende Vorgehensweise dar.
Der Artikel oder die Bilder dürfen ohne Genehmigung des Autors und von Marine Insight in keiner Form reproduziert, kopiert, geteilt oder verwendet werden.