Un governatore è un sistema utilizzato per mantenere la velocità media di un motore, entro determinati limiti, in condizioni di carico fluttuanti. Lo fa regolando e controllando la quantità di carburante fornita al motore. Il regolatore limita quindi il regime del motore quando è in funzione a vuoto, cioè governa il regime minimo e assicura che il regime del motore non superi il valore massimo specificato dai costruttori.
Tutte le navi marittime necessitano di un sistema di controllo della velocità per controllare e regolare la velocità dell’impianto di propulsione utilizzato a bordo, in quanto possono verificarsi numerose variazioni sul carico del motore, che possono danneggiare il motore e causare perdite di vite umane e attrezzature. Le variazioni del carico sul motore possono sorgere a causa di diversi fattori come il mare mosso, il rotolamento e il beccheggio della nave, la struttura della nave compromessa, i cambiamenti nel peso della nave, tra gli altri.
I governatori sono montati anche in motori diesel ausiliari o generatori e alternatori sulla nave.
Related Leggi: Over Speed Trip nei motori diesel & Tipi di Over Speed Trip
- Classificazione dei governatori sulla base della progettazione e della costruzione
- Vantaggi dei governatori meccanici
- Governatori idraulici
- Governatori elettroidraulici
- Classificazione dei governatori sulla base dei loro principi operativi
- Comando idraulico
- Governor sensitivity
- Sistema elettronico
- Manutenzione dei governatori
- Che cosa è Droop?
- Qual è l’uso della molla speeder?
- Che cos’è la banda morta?
- Che cos’è la caccia?
Classificazione dei governatori sulla base della progettazione e della costruzione
Questi governatori sono costituiti da sfere ponderate, o flyweights, che sperimentano una forza centrifuga quando ruotato dall’azione dell’albero motore del motore. Questa forza centrifuga funge da forza di controllo e viene utilizzata per regolare il carburante fornito al motore tramite un meccanismo di limitazione collegato direttamente ai rack di iniezione. Questi gruppi di peso sono piccoli e quindi la forza generata non è sufficiente per controllare le pompe di iniezione di grandi motori. Possono essere utilizzati dove non è richiesto il controllo esatto della velocità. Hanno una grande banda morta e hanno una piccola potenza.
Leggi correlate: Calcolo del consumo di olio combustibile per le navi: cosa dovrebbero sapere i marittimi
Vantaggi dei governatori meccanici
1. Sono economici.
2. Possono essere utilizzati quando non è necessario mantenere una velocità esatta a seconda del carico.
3. Sono semplici nella costruzione e hanno solo poche parti.
Governatori idraulici
Nei governatori idraulici, l’insieme ponderato è collegato a una valvola di controllo, piuttosto che ai rack di controllo del carburante direttamente, come nel caso di un governatore meccanico. Questa valvola è responsabile della direzione del fluido idraulico che controlla i rack del carburante e quindi la potenza o la velocità di un motore. Una forza maggiore può essere generata e questi governatori trovano applicazione in motori di medie e grandi dimensioni. In questi giorni la maggior parte delle navi utilizza governatori idraulici e vengono adattati con controlli elettronici.
Vantaggi e svantaggi dei regolatori idraulici
1. Hanno una potenza elevata,
2. Hanno alta precisione e precisione
3. Hanno alta efficienza
4. La manutenzione dei governatori idraulici è facile
Governatori elettroidraulici
Questi tipi di governatori hanno un attuatore con due sezioni: un backup idraulico meccanico e un governatore elettrico. In caso di guasto del regolatore elettrico, l’unità può essere in controllo manuale, sul regolatore di backup meccanico-idraulico. Il regolatore meccanico è impostato ad una velocità superiore alla velocità nominale, la velocità e il carico dell’intero sistema sono controllati dal regolatore elettrico. Il sistema ha una valvola di controllo elettronica collegata all’armatura in un campo elettromagnetico.
Un ECB (Electronic Control Box), invia un segnale al campo che posiziona l’armatura, e quindi la valvola di controllo che regola l’erogazione del carburante. Il controllo elettrico sostituisce la modalità meccanico-idraulica quando il sistema è impostato sul funzionamento elettronico.
Leggi correlate: 10 punti da considerare durante la gestione del governatore elettromeccanico del motore marino
Vantaggi dei governatori elettronici
1. Risposta più rapida alle variazioni di carico
2. Le funzioni di controllo possono essere facilmente costruite nei governatori
3. Presenza di indicatori e controlli hanno implementato l’automazione
4. Possono essere montati in posizioni lontane dal motore ed eliminare o ridurre la necessità di azionamenti del governatore
Classificazione dei governatori sulla base dei loro principi operativi
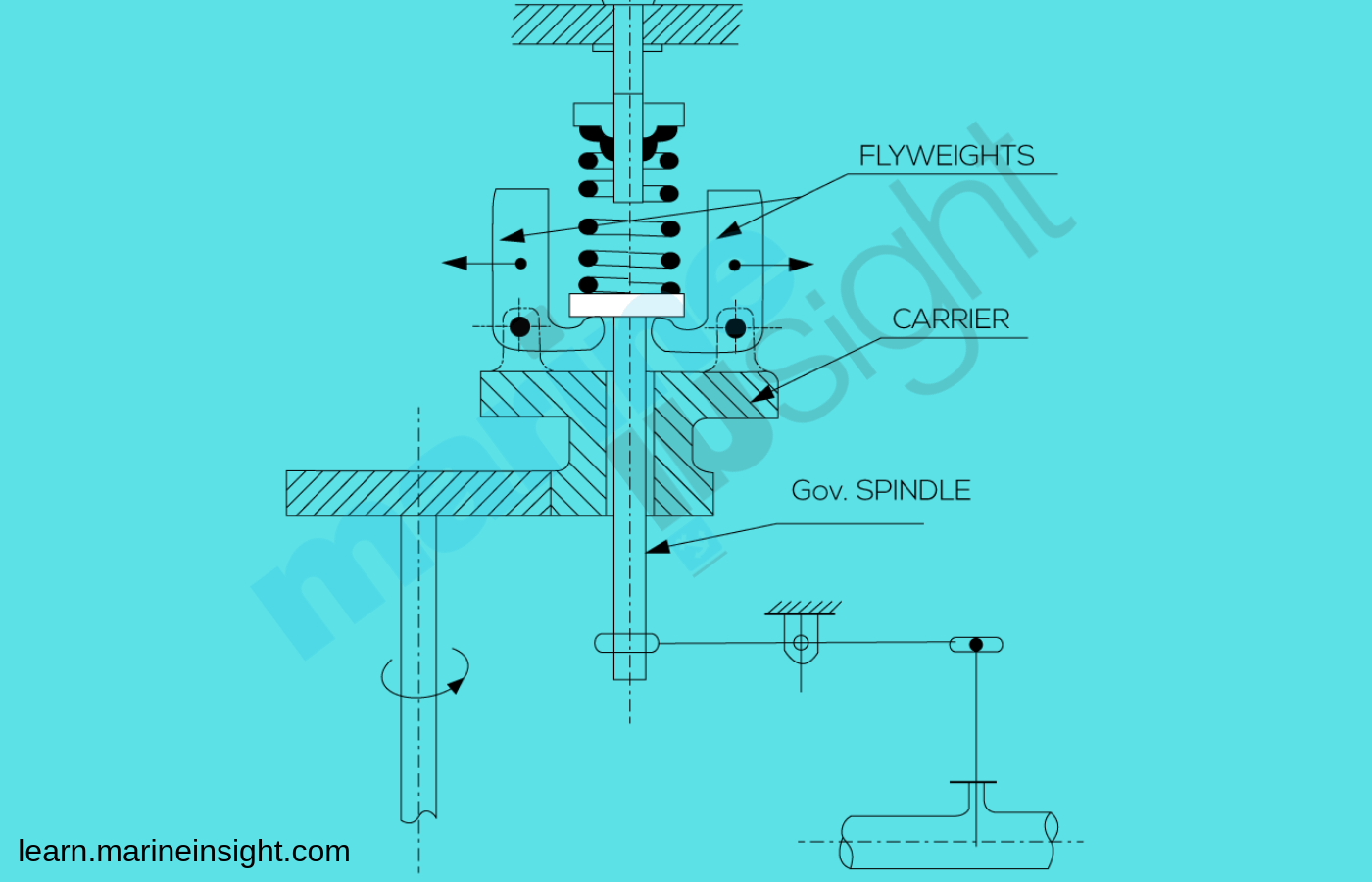
Quasi tutti i tipi di governatori sono dotati di un gruppo flyweight. Due o quattro pesi mosca sono montati su una testa a sfera rotante che viene azionata direttamente dall’albero motore, utilizzando un gruppo di trasmissione ad ingranaggi. La rotazione delle teste a sfera crea una forza centrifuga che agisce sui flyweights del gruppo e li induce a muoversi verso l’esterno, lontano dal loro asse di rotazione. Quando la velocità di rotazione aumenta e aumenta anche il grado di movimento verso l’esterno dei pesi mosca, e viceversa e quindi il movimento dei pesi mosca dipende dal regime del motore.
Viene installata una molla per contrastare la forza centrifuga generata sui flyweights e costringerli verso la loro posizione iniziale. Questa molla è conosciuta come la molla speeder. La posizione dei pesi mosca e il loro movimento verso l’esterno viene trasmesso ad un fuso (questo può essere fatto attraverso un collare), che è libero di muoversi in modo alternativo. Il movimento di questo mandrino, che forma il manicotto di controllo, aziona un collegamento al controllo della pompa del carburante e, infine, controlla la quantità di carburante iniettato.
In normali circostanze operative, cioè velocità e carichi costanti, il manicotto di controllo rimane fermo in quanto la forza sui flyweights è bilanciata dalla forza di contrasto esercitata dalla molla speeder.
All’aumentare del carico sul motore, la velocità del motore si riduce e il manicotto di controllo si sposta verso il basso, poiché la forza esercitata su di esso dalla molla speeder supera la forza esercitata dai pesi mosca.
Il movimento verso il basso del manicotto è collegato ai rack di controllo del carburante in modo tale che vi sia un aumento dell’erogazione di carburante e quindi della potenza generata dal motore. La forza sui flyweights aumenta con il numero di giri del motore e ancora una volta il sistema torna all’equilibrio.
Man mano che il carico sul motore diminuisce, la sua velocità aumenta. I flyweights si muovono verso l’esterno e in-turn il manicotto di controllo si muove verso l’alto come la forza centrifuga supera la forza della molla speeder. Il movimento del manicotto aziona la pompa del carburante, l’erogazione del carburante viene abbassata, quindi la velocità del motore viene ridotta e il sistema entra in equilibrio.
Comando idraulico
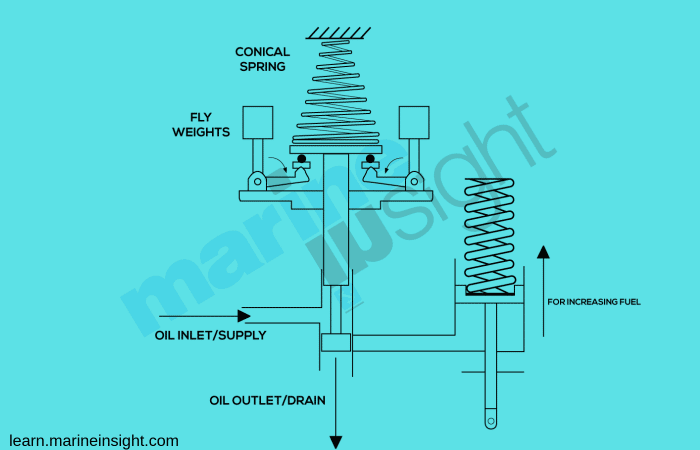
In questo caso, i flyweights sono collegati idraulicamente al gruppo di controllo del carburante. Questo sistema è costituito da una valvola di controllo pilota che è collegata al mandrino del governatore e un pistone. Il pistone è noto come pistone di potenza e controlla la quantità di carburante erogata al motore. Viene azionato dalla forza di una molla e dal fluido idraulico su lati opposti. La quantità di olio nel sistema e, successivamente, la pressione idraulica sul pistone, è regolata dalla valvola pilota che viene infine controllata dal gruppo flyweight.
Il manicotto della valvola di regolazione è aperto nella parte inferiore dove è presente una coppa dell’olio nella parte inferiore dell’alloggiamento del regolatore. Una pompa ad ingranaggi che fornisce olio idraulico ad alta pressione al sistema prende aspirazione dalla coppa dell’olio. È guidato dall’albero motore del governatore. È presente un accumulatore a molla che mantiene la testa di pressione richiesta dell’olio e consente il drenaggio dell’olio in eccesso fino al pozzetto.
In caso di operazioni a velocità e carico costanti, la valvola è posizionata in modo da bloccare le porte nel manicotto della valvola e quindi il passaggio dell’olio al pistone di potenza, che rimane fermo sotto le forze bilanciate.
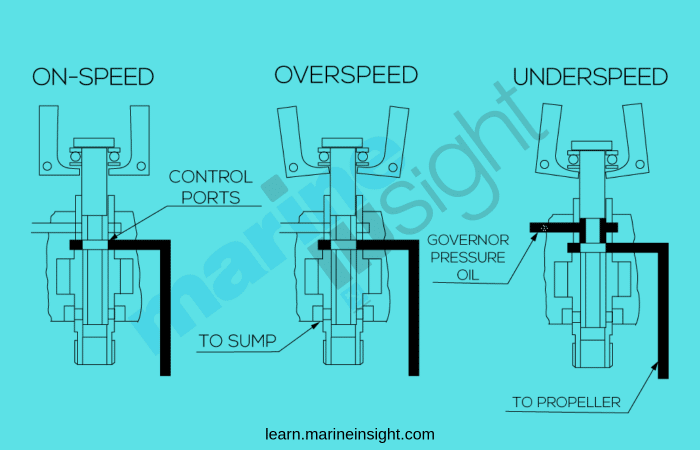
Un aumento del carico diminuisce la velocità del motore. In questo caso, i pesi mosca si muovono verso l’interno, e che il mandrino governatore si muove verso il basso sotto l’azione della forza della molla speeder. Questo movimento abbassa la valvola di controllo pilota che dirige l’olio verso la parte inferiore del pistone di potenza.
Poiché la pressione idraulica sul pistone supera la forza della molla che agisce su di esso, il pistone si sposta verso l’alto e l’alimentazione del carburante al motore del sistema aumenta. quindi aumentando la sua velocità. Una volta che il numero di giri del motore aumenta, la valvola di controllo risale alla sua posizione iniziale che blocca l’erogazione del fluido idraulico al pistone di potenza.
D’altra parte, con la diminuzione del carico sul motore e l’aumento della sua velocità, il movimento verso l’esterno dei pesi mosca sotto l’azione della forza centrifuga aggiuntiva provoca il successivo movimento verso l’alto del mandrino e quindi anche la valvola di controllo pilota sale. Questo apre la porta in modo tale che l’olio idraulico nel sistema fluisca verso la coppa dell’olio da sotto il pistone di potenza attraverso un passaggio di drenaggio. Il pistone di potenza poi si muove verso il basso sotto l’azione della forza della molla e ridotta pressione idraulica e quindi riduce la quantità di carburante fornito al motore è diminuita. Questo riduce il regime del motore e di conseguenza, le forze sui pesi mosca sono bilanciate ancora una volta.
Related Read: Marine Engine Operations-Starting, Running, Stopping
Governor sensitivity
Per aumentare la sensibilità del governatore e per evitare una correzione eccessiva da parte del sistema, un meccanismo di compensazione è incorporato nel design del governatore. Nel caso di un regolatore idraulico, uno stantuffo è presente sull’albero del pistone di potenza e sull’albero di trasmissione. Questi sono noti come lo stantuffo di compensazione di azionamento e lo stantuffo di compensazione di ricezione rispettivamente.
Lo stantuffo di compensazione si muove in un cilindro pieno di fluido idraulico. Questo pistone si muove nella stessa direzione del pistone di potenza. Il movimento verso il basso del pistone di potenza dovuto ad un aumento del regime del motore sposta anche lo stantuffo di compensazione verso il basso. A causa di ciò, lo stantuffo aspira olio da un cilindro presente sotto la boccola della valvola pilota. Questo crea un’aspirazione sopra lo stantuffo di compensazione ricevente, che è una parte della boccola. La boccola si muove verso l’alto e chiude la porta al pistone di potenza.
Pertanto, la porta della valvola pilota viene aperta abbastanza a lungo, in modo che il regime del motore ritorni alla velocità impostata ed eviti il sovracorrezione. Quando i flyweights e la valvola pilota ritornano nella loro posizione centrale, l’olio che scorre attraverso la valvola a spillo consente alla boccola della valvola pilota di raggiungere anche la sua posizione centrale.
La boccola e lo stantuffo devono scendere alla stessa velocità per mantenere la porta chiusa, quindi la valvola a spillo deve essere regolata con attenzione per consentire la corretta quantità di olio di passare attraverso di essa. Ciò dipende dai requisiti del motore secondo il produttore. In caso di diminuzione del regime del motore, lo stantuffo di compensazione di azionamento si sposta verso l’alto e la pressione sullo stantuffo di compensazione ricevente viene aumentata. Si muove verso l’alto con la boccola della valvola pilota.
La porta che porta al cilindro di potenza rimane chiusa e l’olio in eccesso viene scaricato attraverso la valvola a spillo. La boccola viene quindi riportata nella sua posizione centrale.
Sistema elettronico
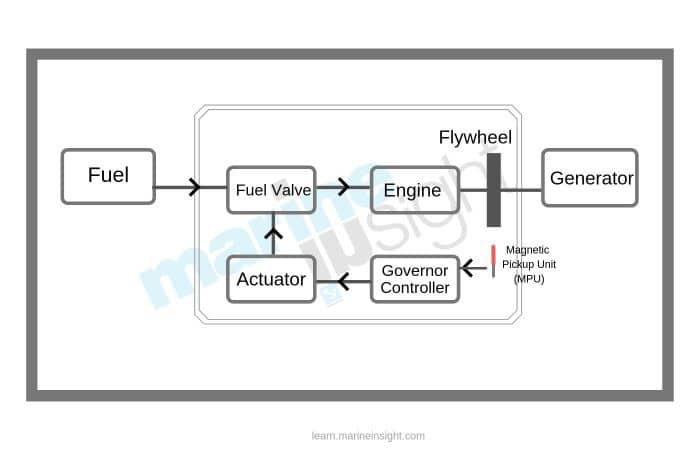
Un regolatore elettronico fornisce la regolazione della velocità del motore dalla condizione a vuoto a pieno carico. È costituito da un controller, un pickup elettromagnetico (MPU) e un attuatore (ACT) per eseguire il controllo e la regolazione della velocità necessari. L’MPU è un micro-generatore e ha un campo magnetico. Consiste di un magnete permanente con un avvolgimento esterno della bobina. Come mostrato nel diagramma, l’MPU è installato sopra i denti del volano e, a seconda della sua distanza dai denti dell’ingranaggio o dalla fessura, il campo magnetico dell’MPU varia rispettivamente da un massimo a un minimo.
A causa del campo magnetico interno in continua evoluzione, nella bobina di conduzione esterna viene generata una tensione e una frequenza CA. Questa tensione CA segue la velocità del volano. Questo è l’aspetto più importante del sistema di controllo elettronico in quanto il regolatore del regolatore converte la frequenza ottenuta in un segnale di tensione continua. Quindi confronta questo con una tensione impostata. I risultati sono calcolati da un controllo PID (Proporzionale-integrale-differenziale) e infine, l’uscita raggiunge l’attuatore che implementa le correzioni necessarie sull’alimentazione del carburante al motore.
Leggi correlate: come sincronizzare i generatori su una nave?
Il controller elettronico ha diverse modalità di funzionamento per implementare varie funzioni. Questi includono;
1. Rilevare l’avviamento di un motore e successivamente dirigere l’alimentazione del carburante.
2. Soppressione del fumo generato dal motore all’aumentare della sua velocità.
3. Regolazione della percentuale di caduta. Di seguito viene fornita una spiegazione dettagliata della percentuale di caduta.
4. Controllo remoto della velocità.
5. Funzionamento a regime minimo: fornisce un controllo di velocità fisso sull’intera capacità di coppia del motore.
6. Controllo della velocità massima: viene utilizzato per eliminare l’eccesso di velocità del motore
Manutenzione dei governatori
- Il governatore deve essere sempre tenuto pulito e dovrebbe essere privo di olio lubrificante sporco.
- Deve essere eseguito un lavaggio regolare del sistema con l’olio lubrificante giusto.
- Il fluido idraulico e l’olio lubrificante devono essere della viscosità corretta come richiesto dai produttori.
- I livelli dell’olio del sistema devono essere mantenuti e controllati.
- Il governatore non deve essere manomesso, e le riparazioni e il funzionamento deve essere effettuata solo essere operatori esperti.
Che cosa è Droop?
All’aumentare del carico sul motore, l’alimentazione del carburante al motore viene aumentata e tuttavia è consentito funzionare a una velocità proporzionalmente inferiore. Questa caratteristica di un sistema di governo è definita come caduta. Quando più motori principali sono collegati allo stesso albero, come nel caso della generazione di energia elettrica, droop consente una divisione stabile del carico tra di loro.
Il motore principale può essere eseguito in modalità di controllo della velocità di caduta, in cui la sua velocità di marcia è impostata come percentuale della velocità effettiva. Poiché il carico sul generatore viene aumentato da vuoto a pieno carico, la velocità effettiva del motore (motore principale) tende a diminuire. Per aumentare la potenza in questa modalità, viene aumentato il riferimento di velocità del motore principale e quindi viene aumentato il flusso di fluido di lavoro (carburante) al motore principale. È misurato come percentuale secondo la formula;
Droop % = (velocità a vuoto-velocità a pieno carico) / Velocità a vuoto
Qual è l’uso della molla speeder?
La velocità regolata del motore viene impostata modificando la tensione della molla di regolazione della velocità, nota anche come molla speeder. La tensione della molla contrasta la forza esercitata dal volano sul mandrino. La pressione della molla determina la velocità del motore necessaria affinché i pesi mosca mantengano la loro posizione centrale.
Che cos’è la banda morta?
La banda morta di un governatore fornisce l’intervallo di velocità dopo il quale il governatore inizia a funzionare per effettuare le regolazioni correttive. All’interno di questo intervallo, il governatore non funziona affatto. La larghezza della banda morta è inversamente proporzionale alla sensibilità del governatore.
Che cos’è la caccia?
La fluttuazione continua del regime del motore attorno alla velocità media richiesta è nota come caccia. Ciò accade quando il governatore è troppo sensibile e cambia l’alimentazione del carburante anche con un piccolo cambiamento nel numero di giri del motore. Fornisce troppo carburante o troppo meno carburante e il manicotto del governatore si sposta ripetutamente nella sua posizione più alta. Questo ciclo continua indefinitamente e si dice che il motore caccia.
Disclaimer: Le opinioni degli autori espresse in questo articolo non riflettono necessariamente le opinioni di Marine Insight. I dati e i grafici, se utilizzati, nell’articolo sono stati ricavati dalle informazioni disponibili e non sono stati autenticati da alcuna autorità statutaria. L’autore e Marine Insight non pretendono di essere precisi né accettano alcuna responsabilità per lo stesso. Le opinioni costituiscono solo le opinioni e non costituiscono linee guida o raccomandazioni su qualsiasi linea di condotta da seguire da parte del lettore.
L’articolo o le immagini non possono essere riprodotti, copiati, condivisi o utilizzati in qualsiasi forma senza il permesso dell’autore e Marine Insight.