un regulator este un sistem care este utilizat pentru a menține viteza medie a unui motor, în anumite limite, în condiții de încărcare fluctuante. Face acest lucru prin reglarea și controlul cantității de combustibil furnizat motorului. Prin urmare, regulatorul limitează turația motorului atunci când acesta funcționează în condiții fără sarcină, adică reglementează turația la ralanti și se asigură că turația motorului nu depășește valoarea maximă specificată de producători.
toate navele marine au nevoie de un sistem de control al vitezei pentru a controla și a controla viteza instalației de propulsie utilizate la bord, deoarece pot exista un număr mare de variații care apar la sarcina motorului, care pot deteriora motorul și pot provoca pierderi de vieți omenești și echipamente. Variațiile sarcinii pe motor pot apărea din cauza mai multor factori, cum ar fi mările agitate, rularea și pitching-ul navei, structura compromisă a navei, modificări ale greutății navei, printre altele.
regulatoarele sunt, de asemenea, montate în motoare diesel auxiliare sau generatoare și alternatoare pe navă.
Related Read: depășirea vitezei la motoarele Diesel & tipuri de depășire a vitezei
- Clasificarea regulatoarelor pe baza proiectării și construcției
- avantajele guvernatorilor mecanici
- guvernatori hidraulici
- guvernatori Electro-hidraulici
- Clasificarea regulatoarelor pe baza principiilor lor de funcționare
- comandă hidraulică
- sensibilitate guvernator
- Sistem Electronic
- Întreținerea guvernatorilor
- ce este Droop?
- care este utilizarea arcului speeder?
- ce este Deadband?
- ce este vânătoarea?
Clasificarea regulatoarelor pe baza proiectării și construcției
aceste regulatoare constau din bile ponderate sau greutăți de zbor, care experimentează o forță centrifugă atunci când sunt rotite de acțiunea arborelui cotit al motorului. Această forță centrifugă acționează ca forță de control și este utilizată pentru a regla combustibilul furnizat motorului printr-un mecanism de accelerație conectat direct la rafturile de injecție. Aceste ansambluri de greutate sunt mici și, prin urmare, forța generată nu este suficientă pentru a controla pompele de injecție ale motoarelor mari. Acestea pot fi utilizate acolo unde nu este necesar un control exact al vitezei. Au o bandă mare și au o putere mică.
Related Citește: consumul de păcură calcule pentru Nave: ce ar trebui să știe navigatorii
avantajele guvernatorilor mecanici
1. Sunt ieftine.
2. Acestea pot fi utilizate atunci când nu este necesar să se mențină o viteză exactă în funcție de sarcină.
3. Ele sunt simple în construcție și au doar câteva părți.
guvernatori hidraulici
în guvernatorii hidraulici, ansamblul ponderat este conectat la o supapă de control, mai degrabă decât la rafturile de control al combustibilului direct, așa cum este cazul unui guvernator mecanic. Această supapă este responsabilă pentru direcționarea fluidului hidraulic care controlează rafturile de combustibil și, prin urmare, puterea sau viteza unui motor. O forță mai mare pot fi generate și aceste guvernatori găsi aplicarea în mediu pentru motoarele de dimensiuni mari. În prezent, majoritatea navelor folosesc regulatoare hidraulice și sunt modernizate cu comenzi electronice.
avantajele și dezavantajele guvernatorilor hidraulici
1. Au o putere mare,
2. Au o precizie ridicată și o precizie
3. Au o eficiență ridicată
4. Întreținerea guvernatorilor hidraulici este ușoară
guvernatori Electro-hidraulici
aceste tipuri de guvernatori au un actuator cu două secțiuni – o rezervă hidraulică mecanică și un guvernator electric. În cazul defectării regulatorului electric, unitatea poate fi controlată manual, pe regulatorul de rezervă mecanic-hidraulic. Guvernatorul mecanic este setat la o viteză mai mare decât viteza nominală, viteza și sarcina întregului sistem sunt controlate de guvernatorul electric. Sistemul are o supapă de control electronică care este conectată la armătură într-un câmp electromagnetic.
un ECB (Electronic Control Box) trimite un semnal către câmpul care poziționează armătura și, prin urmare, supapa de control care reglează alimentarea cu combustibil. Controlul electric suprascrie modul mecanic-hidraulic atunci când sistemul este setat pe funcționarea electronică.
legate de citire: 10 Puncte să ia în considerare în timp ce manipularea guvernator Electro-mecanice de motor Marine
avantajele guvernatorilor electronice
1. Răspuns mai rapid la modificările de încărcare
2. Funcțiile de Control pot fi ușor construite în guvernatorii
3. Prezența indicatorilor și a controalelor au implementat automatizarea
4. Acestea pot fi montate în poziții îndepărtate de motor și pot elimina sau reduce necesitatea acționărilor regulatoare
Clasificarea regulatoarelor pe baza principiilor lor de funcționare
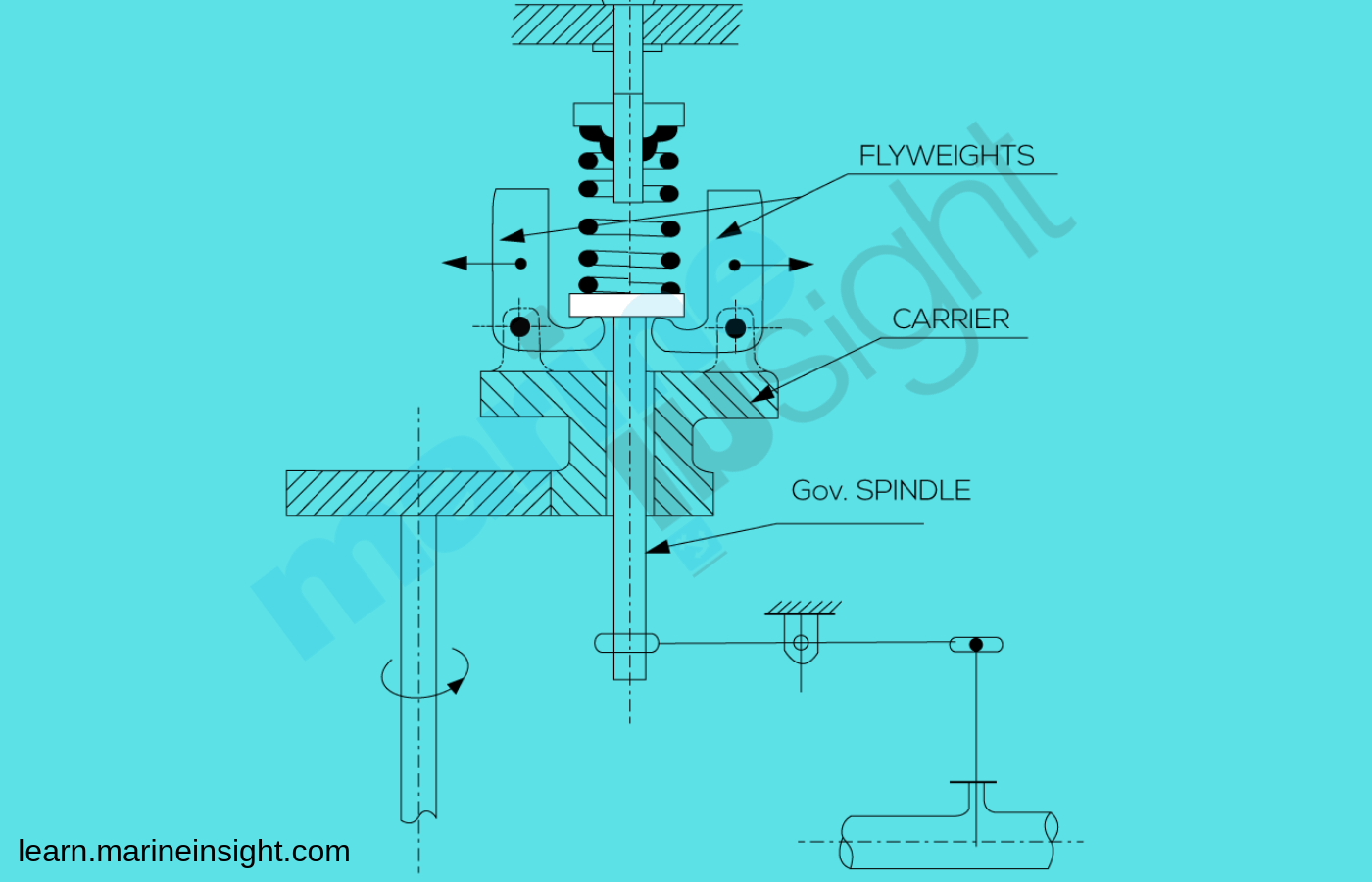
aproape toate tipurile de regulatoare sunt echipate cu un ansamblu cu greutate de zbor. Două sau patru greutăți de zbor sunt montate pe un cap cu bilă rotativ care este acționat direct de arborele motorului, folosind un ansamblu de antrenare a angrenajului. Rotația capetelor cu bile creează o forță centrifugă care acționează asupra greutăților de zbor ale ansamblului și le determină să se deplaseze spre exterior, departe de axa lor de rotație. Pe măsură ce viteza de rotație este crescută și gradul de mișcare spre exterior a greutăților de zbor crește, de asemenea, și invers și, prin urmare, mișcarea greutăților de zbor depinde de turația motorului.
un arc este instalat pentru a contracara forța centrifugă generată pe flyweights și le forțează spre poziția lor inițială. Această primăvară este cunoscută sub numele de primăvara speeder. Poziția flyweights și mișcarea lor spre exterior este transmisă unui fus (acest lucru se poate face printr-un guler), care este liber să se miște într-un mod reciproc. Mișcarea acestui ax, care formează manșonul de control, acționează o legătură cu comanda pompei de combustibil și, în cele din urmă, controlează cantitatea de combustibil injectată.
în condiții normale de funcționare, adică viteză și sarcini constante, manșonul de comandă rămâne staționar, deoarece forța pe greutatea volantului este echilibrată de forța de contracarare exercitată de arcul vitezometrului.
pe măsură ce sarcina pe motor crește, viteza motorului se reduce și manșonul de comandă se deplasează în jos, deoarece forța exercitată asupra acestuia de Arcul de viteză depășește forța exercitată de greutățile de zbor.
mișcarea descendentă a manșonului este legată de rafturile de comandă a combustibilului, astfel încât să existe o creștere a alimentării cu combustibil și, prin urmare, a puterii generate de motor. Forța pe greutăți crește odată cu turația motorului și din nou sistemul revine la echilibru.
pe măsură ce sarcina motorului scade, viteza acestuia crește. Greutățile de zbor se deplasează spre exterior și, la rândul său, manșonul de control se deplasează în sus pe măsură ce forța centrifugă depășește forța arcului de viteză. Mișcarea manșonului acționează pompa de combustibil, alimentarea cu combustibil este coborâtă, astfel viteza motorului este redusă și sistemul intră în echilibru.
comandă hidraulică
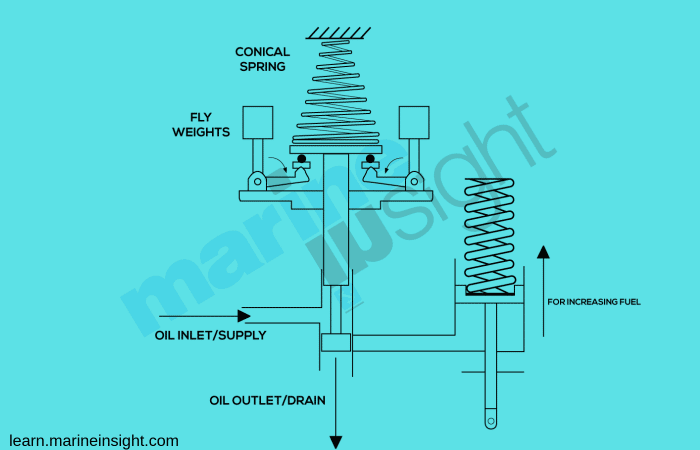
în acest caz, greutățile de zbor sunt legate hidraulic de ansamblul de comandă a combustibilului. Acest sistem constă dintr-o supapă de control pilot care este conectată la axul guvernator și la un piston. Pistonul este cunoscut sub numele de piston de putere și controlează cantitatea de combustibil livrată motorului. Se acționează prin forța unui arc și a fluidului hidraulic pe laturile opuse. Cantitatea de ulei din sistem și, ulterior, presiunea hidraulică pe piston, este reglată de supapa pilot care este controlată în cele din urmă de ansamblul flyweight.
manșonul supapei de comandă este deschis în partea inferioară unde este prezentă o baie de ulei în partea inferioară a carcasei regulatorului. O pompă cu angrenaj care furnizează ulei hidraulic de înaltă presiune sistemului preia aspirația din Baia de ulei. Este acționat de arborele de antrenare al guvernatorului. Este prezent un acumulator cu arc care menține capul de presiune necesar al uleiului și permite scurgerea excesului de ulei înapoi în bazin.
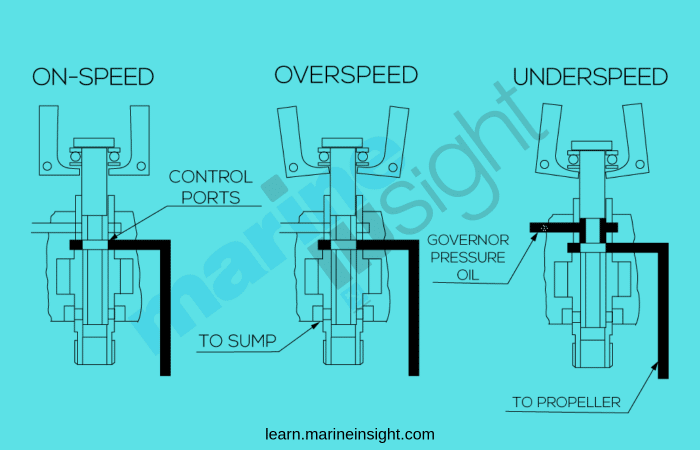
în cazul operațiilor de viteză și sarcină constante, supapa este poziționată pentru a bloca orificiile din manșonul supapei și, prin urmare, trecerea uleiului la pistonul de putere, care rămâne staționar sub forțele echilibrate.
o creștere a sarcinii scade turația motorului. În acest caz, greutățile de zbor se mișcă spre interior și că fusul de Guvernator se deplasează în jos sub acțiunea forței arcului de viteză. Această mișcare coboară supapa de control pilot care direcționează uleiul către partea inferioară a pistonului de putere.
pe măsură ce presiunea hidraulică pe piston depășește forța arcului care acționează asupra acestuia, pistonul se deplasează în sus și alimentarea cu combustibil a motorului sistemului este mărită. prin urmare, creșterea vitezei sale. Odată ce turația motorului crește, supapa de control se ridică înapoi în poziția inițială care blochează livrarea fluidului hidraulic către pistonul de putere.
pe de altă parte, pe măsură ce sarcina motorului scade și viteza acestuia crește, mișcarea spre exterior a greutăților de zbor sub acțiunea forței centrifuge suplimentare determină mișcarea ulterioară în sus a axului și, prin urmare, crește și supapa de control pilot. Aceasta deschide portul astfel încât uleiul hidraulic din sistem să curgă către Baia de ulei de sub pistonul de putere printr-un pasaj de drenaj. Pistonul de putere se deplasează apoi în jos sub acțiunea forței arcului și a presiunii hidraulice reduse și, prin urmare, reduce cantitatea de combustibil furnizată motorului este scăzută. Acest lucru reduce turația motorului și, în consecință, forțele de pe flyweights sunt echilibrate din nou.
Related Read: operațiuni ale motorului Marin – pornire, funcționare, oprire
sensibilitate guvernator
pentru a crește sensibilitatea guvernatorului și pentru a preveni corectarea excesivă de către sistem, un mecanism de compensare este încorporat în proiectarea guvernatorului. În cazul unui guvernator hidraulic, un piston este prezent pe arborele pistonului de putere și pe arborele de antrenare. Acestea sunt cunoscute sub numele de piston de compensare de acționare și, respectiv, piston de compensare receptor.
pistonul compensator se deplasează într-un cilindru plin de lichid hidraulic. Acest Piston se deplasează în aceeași direcție cu pistonul de putere. Mișcarea descendentă a pistonului de putere datorită creșterii turației motorului deplasează, de asemenea, pistonul compensator în jos. Datorită acestui fapt, pistonul extrage ulei dintr-un cilindru prezent sub bucșa supapei pilot. Aceasta creează o aspirație deasupra pistonului de compensare a receptorului, care face parte din bucșă. Bucșa se deplasează în sus și închide portul la pistonul de putere.
astfel, portul supapei pilot este deschis suficient de lung, astfel încât turația motorului să revină la viteza setată și să evite supracorecția. Pe măsură ce greutățile de zbor și supapa pilot revin în poziția lor centrală, uleiul care curge prin supapa acului permite bucșei supapei pilot să ajungă și în poziția sa centrală.
bucșa și pistonul trebuie să coboare la aceeași viteză pentru a menține orificiul închis, astfel încât supapa acului trebuie reglată cu atenție pentru a permite trecerea cantității corecte de ulei. Acest lucru depinde de cerințele motorului conform producătorului. În cazul unei scăderi a turației motorului, pistonul compensator de acționare se deplasează în sus și crește presiunea asupra pistonului compensator de recepție. Se mișcă în sus cu bucșa supapei pilot.
orificiul care duce la cilindrul electric rămâne închis și excesul de ulei este golit prin supapa acului. Bucșa este apoi readusă în poziția sa centrală.
Sistem Electronic
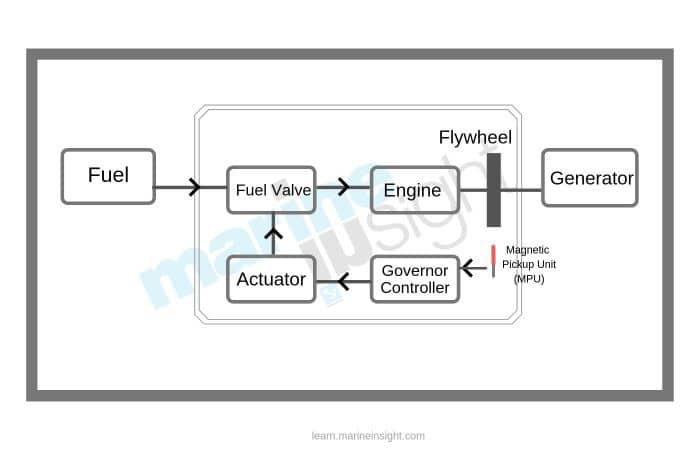
un regulator Electronic asigură reglarea turației motorului de la starea fără sarcină la sarcina maximă. Se compune dintr-un controler, un Pickup Electro-Magnetic (MPU) și un actuator (ACT) pentru a efectua controlul și reglarea vitezei necesare. MPU este un micro-generator și are un câmp magnetic. Se compune dintr-un magnet permanent cu o înfășurare externă a bobinei. După cum se arată în diagramă, MPU este instalat deasupra dinților volantului și, în funcție de Distanța sa față de dinții sau fanta angrenajului, câmpul magnetic al MPU variază de la maxim la minim.
datorită câmpului magnetic intern în continuă schimbare, o tensiune și o frecvență de curent alternativ sunt generate în bobina conductoare exterioară. Această tensiune de curent alternativ urmează viteza volantului. Acesta este cel mai important aspect al sistemului de control electronic, deoarece regulatorul de guvernator convertește frecvența obținută într-un semnal de tensiune DC. Apoi compară acest lucru cu o tensiune setată. Rezultatele sunt calculate printr-un control PID (proporțional-integral-diferențial) și, în final, ieșirea ajunge la actuatorul care implementează corecțiile necesare la alimentarea cu combustibil a motorului.
Related Read: cum se sincronizează generatoarele pe o navă?
controlerul electronic are diferite moduri de funcționare pentru a implementa diferite funcții. Acestea includ;
1. Detectarea pornirii unui motor și direcționarea ulterioară a alimentării cu combustibil.
2. Suprimarea fumului generat de motor pe măsură ce viteza acestuia crește.
3. Ajustarea procentului de ofilire. O explicație detaliată a procentului de cădere este prezentată mai jos.
4. Controlul vitezei de la distanță.
5. Funcționarea turației la ralanti: asigură controlul fix al vitezei asupra întregii capacități de cuplu a motorului.
6. Controlul vitezei maxime: este utilizat pentru a elimina excesul de viteză al motorului
Întreținerea guvernatorilor
- guvernatorul trebuie păstrat întotdeauna curat și nu trebuie să conțină ulei lubrifiant murdar.
- trebuie efectuată spălarea regulată a sistemului cu uleiul de lubrifiere potrivit.
- fluidul hidraulic și uleiul de lubrifiere trebuie să aibă vâscozitatea corectă, așa cum este mandatat de producători.
- nivelul uleiului din sistem trebuie menținut și verificat.
- guvernatorul nu trebuie modificat, iar reparațiile și funcționarea trebuie efectuate numai de operatori experimentați.
ce este Droop?
pe măsură ce sarcina pe motor crește, alimentarea cu combustibil a motorului crește și totuși este permisă funcționarea la o viteză proporțional mai mică. Această caracteristică a unui sistem de guvernare este numit ca ofili. Atunci când mai mult de un prim movers sunt conectate la același arbore, ca și în cazul generării de energie electrică, căderea permite o diviziune stabilă a sarcinii între ele.
motorul principal poate fi rulat în modul de control al vitezei de cădere, în care viteza sa de rulare este setată ca procent din viteza reală. Pe măsură ce sarcina generatorului este crescută de la sarcină fără sarcină la sarcină maximă, viteza reală a motorului (motorul principal) tinde să scadă. Pentru a crește puterea de ieșire în acest mod, referința vitezei motorului principal este mărită și, prin urmare, fluxul de fluid de lucru (combustibil) către motorul principal este crescut. Se măsoară ca procent conform formulei;
Droop% = (fără viteză de încărcare – Viteză maximă de încărcare) / fără viteză de încărcare
care este utilizarea arcului speeder?
viteza reglată a motorului este setată prin schimbarea tensiunii arcului de reglare a vitezei, cunoscut și sub numele de arc de viteză. Tensiunea arcului contracarează forța exercitată de volant pe ax. Presiunea arcului determină viteza motorului necesară pentru ca greutățile să-și mențină poziția centrală.
ce este Deadband?
banda mortă a unui guvernator oferă intervalul de viteză după care guvernatorul începe să funcționeze pentru a face ajustări corective. În acest interval, guvernatorul nu funcționează deloc. Lățimea benzii moarte este invers proporțională cu sensibilitatea guvernatorului.
ce este vânătoarea?
fluctuația continuă a turației motorului în jurul vitezei medii necesare este cunoscută sub numele de vânătoare. Acest lucru se întâmplă atunci când guvernatorul este prea sensibil și modifică alimentarea cu combustibil chiar și cu o mică modificare a turației motorului. Furnizează fie prea mult combustibil, fie prea puțin combustibil, iar manșonul guvernatorului se deplasează în mod repetat în poziția sa cea mai înaltă. Acest ciclu continuă la nesfârșit și se spune că motorul vânează.
Disclaimer: Opiniile autorilor exprimate în acest articol nu reflectă neapărat punctele de vedere ale Marine Insight. Datele și graficele, dacă sunt utilizate, din articol au fost obținute din informațiile disponibile și nu au fost autentificate de nicio autoritate statutară. Autorul și Marine Insight nu pretind că sunt corecte și nici nu acceptă nicio responsabilitate pentru același lucru. Punctele de vedere constituie doar opiniile și nu constituie orientări sau recomandări cu privire la orice curs de acțiune care trebuie urmat de cititor.
articolul sau imaginile nu pot fi reproduse, copiate, partajate sau utilizate în orice formă fără permisiunea autorului și Marine Insight.