Vi siete mai chiesti come un sensore di prossimità induttivo sia in grado di rilevare la presenza di un bersaglio metallico? Mentre l’ingegneria elettrica sottostante è sofisticata, il principio di base del funzionamento non è troppo difficile da capire.
Al centro di un sensore di prossimità induttivo (“prox “” sensor ” o “prox sensor” in breve) c’è un oscillatore elettronico costituito da una bobina induttiva composta da numerosi giri di filo di rame molto fine, un condensatore per la memorizzazione della carica elettrica e una fonte di energia per fornire eccitazione elettrica. Le dimensioni della bobina induttiva e del condensatore sono abbinate per produrre un’oscillazione sinusoidale autosufficiente a frequenza fissa. La bobina e il condensatore agiscono come due molle elettriche con un peso appeso tra di loro, spingendo costantemente gli elettroni avanti e indietro tra loro. L’energia elettrica viene immessa nel circuito per avviare e sostenere l’oscillazione. Senza sostenere l’energia, l’oscillazione collasserebbe dovuto le piccole perdite di potere dalla resistenza elettrica del filo di rame sottile nella bobina ed altre perdite parassite.
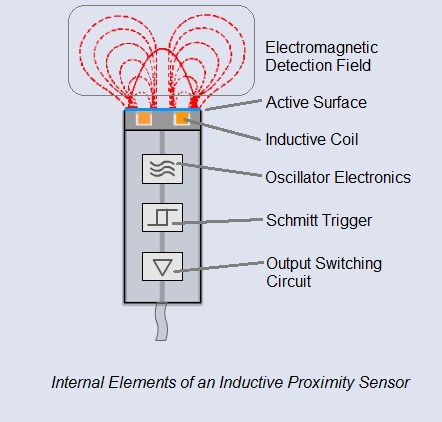
L’oscillazione produce un campo elettromagnetico davanti al sensore, perché la bobina si trova proprio dietro la “faccia” del sensore. Il nome tecnico della faccia del sensore è “superficie attiva”.
Quando un pezzo di metallo conduttivo entra nella zona definita dai confini del campo elettromagnetico, parte dell’energia di oscillazione viene trasferita nel metallo del bersaglio. Questa energia trasferita appare come minuscole correnti elettriche circolanti chiamate correnti parassite. Questo è il motivo per cui i prox induttivi sono talvolta chiamati sensori a correnti parassite.
Le correnti parassite che scorrono incontrano resistenza elettrica mentre cercano di circolare. Questo crea una piccola quantità di perdita di potenza sotto forma di calore (proprio come un piccolo riscaldatore elettrico). La perdita di potenza non è completamente sostituita dalla fonte di energia interna del sensore, quindi l’ampiezza (il livello o l’intensità) dell’oscillazione del sensore diminuisce. Alla fine, l’oscillazione diminuisce al punto che un altro circuito interno chiamato Trigger di Schmitt rileva che il livello è sceso al di sotto di una soglia predeterminata. 
 Questa soglia è il livello in cui la presenza di un target metallico è definitivamente confermata. Al rilevamento del bersaglio da parte del grilletto Schmitt, l’uscita del sensore viene attivata.
Questa soglia è il livello in cui la presenza di un target metallico è definitivamente confermata. Al rilevamento del bersaglio da parte del grilletto Schmitt, l’uscita del sensore viene attivata.
La breve animazione a destra mostra l’effetto di un bersaglio metallico sul campo magnetico oscillante del sensore. Quando si vede il cavo che esce dal sensore diventa rosso, significa che il metallo è stato rilevato e il sensore è stato acceso. Quando il bersaglio si allontana, si può vedere che l’oscillazione ritorna al suo livello massimo e l’uscita del sensore viene disattivata.
Vuoi saperne di più sui principi di funzionamento di base dei sensori di prossimità induttivi? Ecco un breve video di YouTube che copre le basi:
