ガバナーは、変動する負荷条件の下で、一定の制限内でエンジンの平均速度を維持するために使用されるシ それはエンジンに供給される燃料の量を調整し、制御することによってこれをする。 知事はそれ故に無負荷状態で動いているときエンジンの速度を限る、すなわち遊んでいる速度を支配し、エンジン回転数が製造業者によって指定さ
すべての船舶は、エンジン負荷に多数の変動が生じ、エンジンを損傷し、人命や機器の損失を引き起こす可能性があるため、船上で使用されている推進プラントの速度を制御し、制御するための速度制御システムを必要としています。 エンジンの負荷の変化は、荒海、船舶のローリングおよびピッチング、船舶の構造の侵害、船舶の重量の変化などのいくつかの要因によって生じる可能性が
ガバナーは、補助ディーゼルエンジンまたは発電機、および船の交流発電機にも装備されています。
関連する読み取り:ディーゼルエンジンのオーバースピードトリップ&オーバースピードトリップの種類
設計と建設に基づくガバナーの分類
これらのガバナーは、エンジンクランクシャフトの作用によって回転すると遠心力を経験する重み付けボール、またはフライウェイトで構成されています。 この遠心力が制御力として機能し、注入の棚に直接接続される絞るメカニズムによってエンジンに供給される燃料を調整するのに使用されてい これらの重量アセンブリは小さく、それ故に発生する力は大きいエンジンの注入ポンプを制御するには十分ではない。 それらは厳密な速度制御が要求されないところに使用することができる。 それらに大きい不感帯があり、小さい出力がある。
関連読み:船舶の燃料油消費量計算:船員が知っておくべきこと
機械式ガバナーの利点
1. 彼らは安いです。
2. それらは負荷によって厳密な速度を維持することは必要ではないとき使用することができる。
3. それらは構造で簡単で、少数の部品だけがあります。
Hydraulic governor
hydraulic governorでは、重み付けされたアセンブリは、機械ガバナーの場合のように、燃料制御ラックではなく、直接制御バルブに接続されています。 この弁はエンジンの燃料の棚そしてそれ故に力か速度を制御する油圧液体を指示するために責任がある。 より大きい力は発生させることができ、これらの知事は大型エンジンに媒体の適用を見つける。 このごろほとんどの船は油圧知事を使用し、電子制御と改装されている。
油圧ガバナーの長所と短所
1.
2の高出力を持っています。 彼らは高い精度と精度を持っています
3。 彼らは高い効率を持っています
4。 油圧ガバナーのメンテナンスが容易
電気油圧ガバナー
これらのガバナーには、機械式油圧バックアップと電気ガバナーの二つのセク 電気知事の失敗の場合には、単位は機械油圧バックアップ知事の手動制御に、ある場合もある。 機械知事は評価されるspedより高い速度で置かれます、全体のシステムの速度そして負荷は電気知事によって制御されます。 システムは電磁場の電機子に接続される電子制御弁を備えている。
ECB(Electronic Control Box)は、電機子を配置するフィールドに信号を送信し、したがって燃料供給を調節する制御弁を送信します。 システムが電子操作に設定されている場合、電気制御は機械油圧モードを上書きします。
関連記事:舶用エンジンの電気機械式ガバナーを扱う際に考慮すべき10のポイント
電子ガバナーの利点
1. 負荷の変化に対するより高速な応答
2。 制御機能はガバナー
3で簡単に構築できます。 インジケータとコントロールの存在は、自動化を実装しています
4。 それらはエンジンから離れた位置に取付けられ、知事ドライブのための必要性を除去するか、または減らすことができる
運営原則に基づく知事の分類
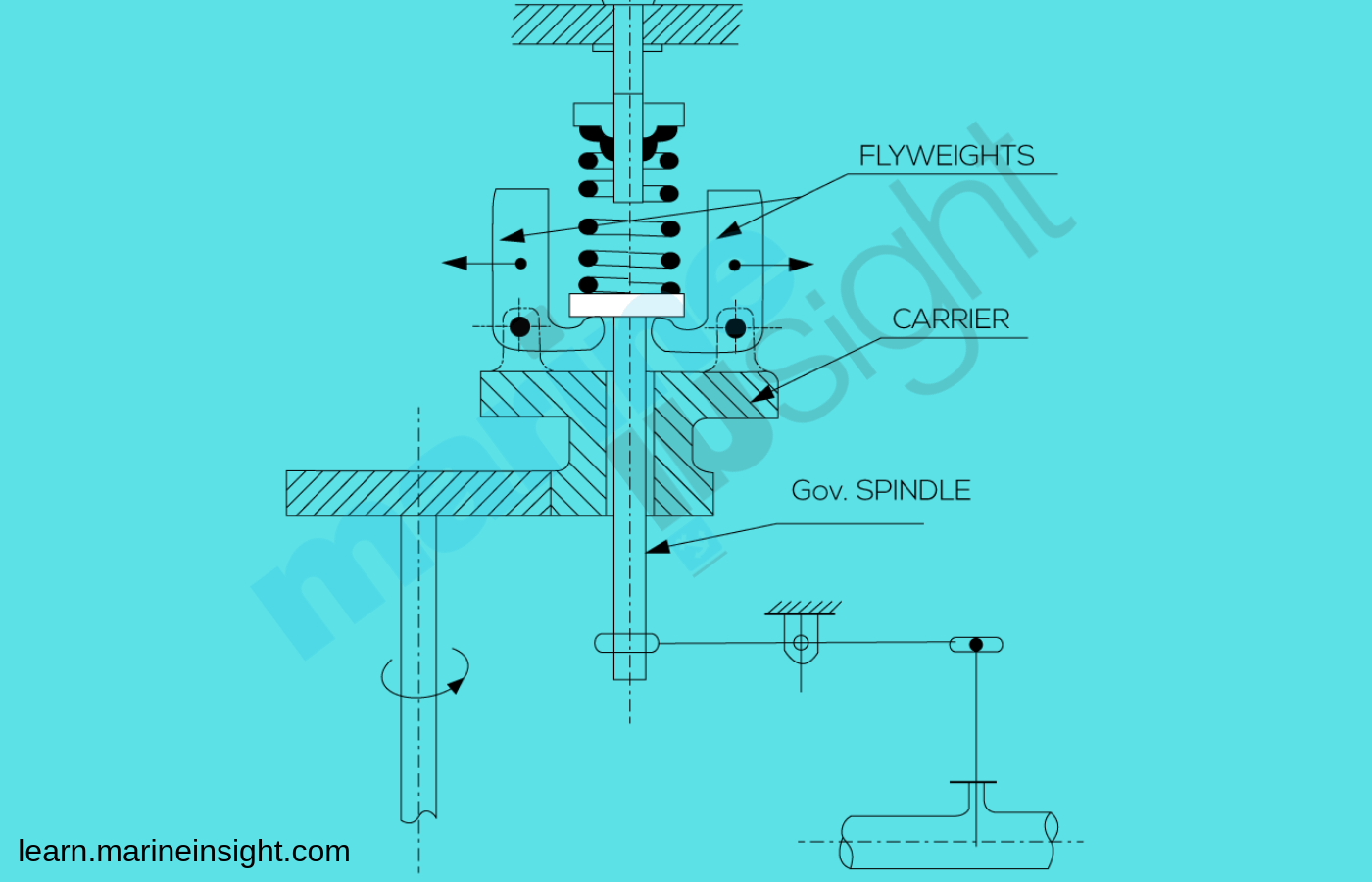
ほとんどすべてのタイプの知事はフライウェイトアセンブリによって合う。 二つまたは四つのフライウェイトは、ギアドライブアセンブリを使用して、エンジンシャフトによって直接駆動される回転ボールヘッドに搭載されてい ボールヘッドの回転は、アセンブリのフライウェイトに作用し、それらを回転軸から離れて外側に移動させる遠心力を生成する。 回転速度が増加し、フライウェイトの外側への動きの程度も増加し、その逆であり、したがってフライウェイトの動きはエンジン速度に依存する。
フライウェイトに発生する遠心力を打ち消すためにスプリングが設置されており、フライウェイトを初期位置に向けて強制的に強制します。 このばねはspeederのばねとして知られています。 フライウェイトの位置とその外側への動きは、スピンドル(これは襟を介して行うことができる)に伝達され、往復運動で自由に移動することができる。 制御袖を形作るこの紡錘の動きは燃料ポンプ制御に連結を作動させ、最終的に注入される燃料の量を制御する。
通常の運用状況、すなわち一定の速度と負荷の下では、フライウェイトの力がスピーダースプリングによって加えられる反力によって釣り合っているため、制御スリーブは静止したままである。
エンジンへの負荷が増加すると、エンジンの速度が低下し、コントロールスリーブが下方に移動します。
スリーブの下方への移動は燃料制御ラックにリンクされており、燃料供給が増加し、エンジンによって発電される電力が増加するようになっています。 フライウェイトの力はエンジン回転数とともに増加し、再びシステムは平衡に戻る。
エンジンへの負荷が減少すると、速度が上がります。 フライウェイトは外側に動き、回転制御袖は遠心力がより速くばね力を克服すると同時に動く。 スリーブの動きが燃料ポンプを作動させ、燃料供給が低下するので、エンジンの速度が低下し、システムが平衡状態になる。
油圧制御
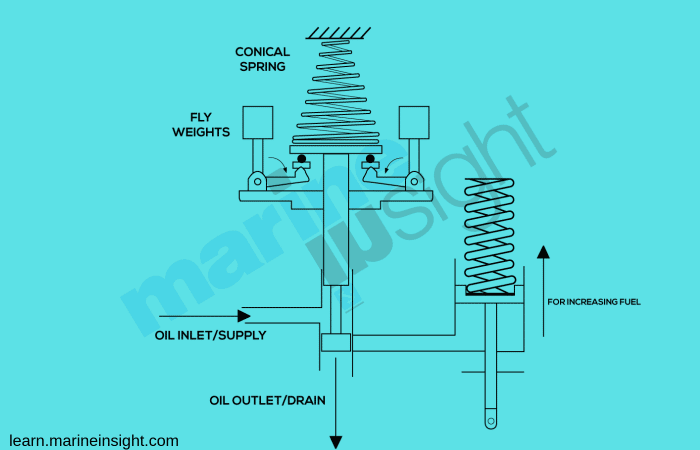
この場合、フライウェイトは燃料制御アセンブリに油圧でリンクされます。 このシステムは知事の紡錘およびピストンに接続される試験制御弁から成っている。 ピストンはパワーピストンとして知られており、エンジンに供給される燃料の量を制御します。 それは反対側のばねそして油圧液体の力によって機能されます。 システムのオイルの量、および続いて、ピストンの油圧圧力はflyweightアセンブリによって最終的に制御される試験弁によって、調整される。
ガバナーハウジングの下側にオイルサンプがある底部に制御バルブスリーブが開いています。 システムに高圧作動油を供給する歯車ポンプはオイルの油溜めからの吸引を取ります。 それは知事ドライブシャフトによって運転される。 オイルの必須圧力頭部を維持し、油溜めに戻って過剰油の排水を可能にするバネ付き蓄積装置はある。
一定速度および負荷操作の場合には、弁は釣り合った力の下で静止している残る力ピストンへの弁の袖そしてそれ故にオイルの道の港を妨げる
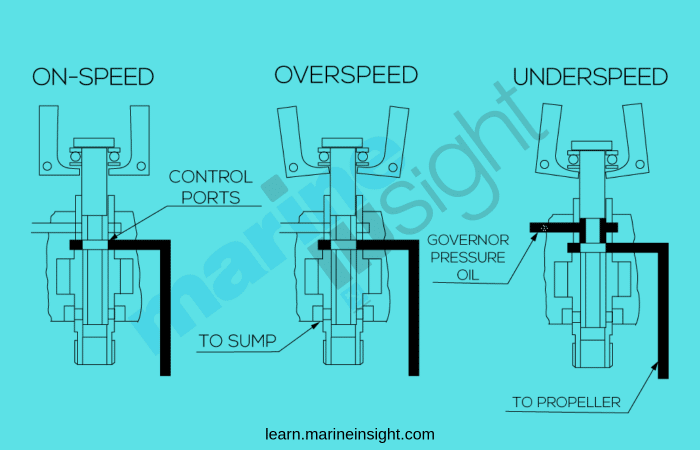
負荷の増加はエンジン回転数を減少させます。 この場合、フライウェイトは内側に移動し、知事スピンドルは、スピーダーばねの力の作用の下で下方に移動すること。 この動きは力ピストンの下側にオイルを指示する試験制御弁を下げる。
ピストンの油圧がそれに作用するばね力を克服するにつれて、ピストンが上方に移動し、システムエンジンへの燃料供給が増加する。 したがって、その速度を増加させる。 エンジンのRPMが増加すれば、制御弁は力ピストンに油圧液体の配達を妨げる最初の位置に戻って上がる。
一方、エンジンへの負荷が減少し、速度が増加するにつれて、追加の遠心力の作用下でフライウェイトが外側に移動すると、その後のスピンドルの上 これはシステムの作動油が排水の道を通って力ピストンの下からオイルの油溜めに流れるように港を開けます。 力ピストンはばね力および減らされた油圧圧力の行為の下でそれから下方に動き、それ故にエンジンに供給される燃料の量を減ります減らします。 これによりエンジン速度が低下し、その結果、フライウェイト上の力が再びバランスされます。
関連する読み取り:船舶エンジン操作–始動、走行、停止
ガバナー感度
ガバナーの感度を高め、システムによる過補正を防ぐために、ガバナーの設計に補償 油圧知事の場合には、プランジャーは力ピストンシャフトとドライブシャフトにある。 これらは、それぞれ作動補償プランジャと受信補償プランジャとして知られています。
補償プランジャは、作動油でいっぱいのシリンダー内を移動します。 このプランジャーは、パワーピストンと同じ方向に移動します。 エンジン回転数の増加によるパワーピストンの下方への移動はまた、補償プランジャを下方に移動させる。 これが原因で、プランジャーは試験弁のブッシュの下で現在のシリンダーからオイルを引く。 これはブッシュの部分である受け入れの償いのプランジャーの上の吸引を作成する。 ブッシュは上向きに動き、力ピストンに港を閉める。
このように、パイロットバルブポートは、エンジン速度が設定されたレートに戻り、過補正を避けるために、十分な長さだけ開かれています。 フライウェイトおよび試験弁が中央位置に戻ると同時に、針弁を通って流れるオイルは試験弁のブッシュがまた中央位置に達するようにする。
ブッシングとプランジャは同じ速度で下降してポートを閉じたままにする必要があるため、ニードルバルブは適切な量のオイルが通過するように慎重に調整する必要があります。 これは製造業者に従ってエンジンの条件に左右される。 エンジン回転数の減少の場合には、作動の償いのプランジャは上向きに動き、受け入れの償いのプランジャの圧力は増加する。 それは試験弁のブッシュと動く。
パワーシリンダーに通じるポートは閉じたままで、余分な油はニードルバルブを通して排出されます。 ブッシュは中央位置にそれから戻ります。
電子システム
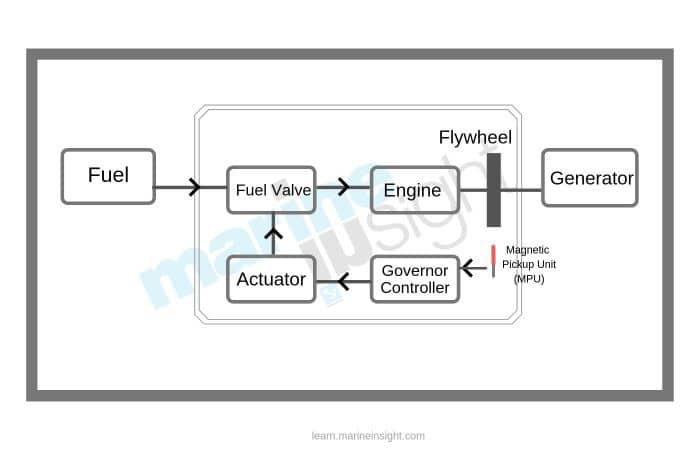
電子知事は無負荷状態からの満載にエンジン速度の調節を提供する。 それはコントローラー、電磁石の積み込み(MPU)およびアクチュエーター(行為)から必要な速度制御および規則を遂行するために成っている。 MPUはマイクロ発電機であり,磁場を有する。 それは外的なコイル巻線が付いている永久マグネットから成っています。 図に示すように、MPUはフライホイールの歯の上に設置され、歯車の歯またはスロットからの距離に応じて、MPUの磁場はそれぞれ最大から最小まで変化
内部磁場が絶えず変化するため、外部導電コイルに交流電圧と周波数が発生します。 このAC電圧はフライホイールの速度に従います。 これは、ガバナコントローラが得られた周波数を直流電圧信号に変換するため、電子制御システムの最も重要な側面です。 次に、これを設定電圧と比較します。 結果はPID制御(比例積分差動)によって計算され、最終的に、出力はエンジンへの燃料供給の必須の訂正を実行するアクチュエーターに達する。
関連記事:船の発電機を同期させるには?
電子制御装置には、さまざまな機能を実装するための異なる動作モードがあります。
1. エンジンの始動を検出し、その後燃料供給を指示する。
2. その速度が増加するにつれて、エンジンによって生成される煙を抑制します。
3. ドループの割合を調整します。 垂下率の詳細な説明を以下に示します。
4. 遠隔速度制御。
5. 遊んでいる速度操作:それはエンジンの全体のトルク容量の固定速度制御を提供します。
6. 最高速度制御:エンジンの促進に除去することを使用します
知事の維持
- 知事はきれい常に保たれるべきで、汚れた潤滑油
- 適切な潤滑油でシステムを定期的に洗い流す必要があります。
- 作動油および潤滑油は、製造業者によって義務付けられている正しい粘度である必要があります使用する必要があります。
- システムのオイルレベルを維持し、チェックする必要があります。
- ガバナーは改ざんされるべきではなく、修理および操作は経験豊富なオペレータのみが行うべきである。
ドループとは何ですか?
エンジンへの負荷が増加するにつれて、エンジンへの燃料供給が増加しますが、それに比例して低速で走行することができます。 支配システムのこの特徴は、垂下と呼ばれています。 複数の原動機が同じシャフトに接続されている場合、電力を発生させる場合のように、垂下はそれらの間の負荷の安定した分割を可能にする。
原動機は、その走行速度が実際の速度の割合として設定されている垂下速度制御モードで実行することができます。 発電機の負荷が無負荷から全負荷に増加するにつれて、エンジン(原動機)の実際の速度は低下する傾向がある。 このモードの出力を高めるためには、原動機の速度の参照は高められ、従って原動機への作動流体(燃料)の流れは高められます。 これは、式に従ってパーセンテージとして測定されます。
Droop%=(無負荷速度-全負荷速度)/無負荷速度
speederのばねの使用は何ですか。
エンジンの支配された速度はまたspeederのばねとして知られている速度の調節のばねの張力の変更によって置かれます。 ばねの張力は紡錘のフライホイールによって出る力を打ち消す。 ばねの圧力は、フライウェイトが中心位置を維持するために必要なエンジンの速度を決定する。
デッドバンドとは何ですか?
ガバナーのデッドバンドは、ガバナーが修正調整を行うために動作を開始するまでの速度の範囲を与えます。 この範囲内では、ガバナーはまったく動作しません。 不感帯の幅はガバナーの感度に反比例します。
狩猟とは何ですか?
平均所要速度を中心としたエンジン回転数の連続的な変動はハンチングとして知られています。 これは、ガバナーがあまりにも敏感であり、エンジン回転数のわずかな変化でも燃料供給を変化させる場合に発生します。 それはたくさんの燃料を供給するか、または余りにより少ない燃料および知事の袖は最も高い位置に繰り返し動く。 このサイクルは無期限に続き、エンジンは狩りと言われています。
: この記事で表明された著者の見解は、必ずしも海洋の洞察の見解を反映しているわけではありません。 この記事で使用されている場合、データおよびチャートは入手可能な情報から調達されており、法的権限によって認証されていません。 著者とMarine Insightは、それが正確であると主張したり、同じことについて一切の責任を負いません。 意見は意見のみを構成し、読者が従うべき行動のいずれかのコース上の任意のガイドラインや勧告を構成するものではありません。
記事または画像は、著者およびMarine Insightの許可なしに、いかなる形式でも複製、コピー、共有、または使用することはできません。