säädin on järjestelmä, jota käytetään pitämään moottorin keskinopeus tietyissä rajoissa vaihtelevissa kuormitusolosuhteissa. Se tekee tämän säätelemällä ja säätelemällä moottoriin syötettävän polttoaineen määrää. Säädin siis rajoittaa moottorin nopeutta sen käydessä kuormittamattomassa tilassa, eli se säätelee joutokäyntinopeutta ja varmistaa, ettei moottorin kierrosnopeus ylitä valmistajan ilmoittamaa enimmäisarvoa.
kaikki merialukset tarvitsevat nopeudensäätöjärjestelmän aluksessa käytettävän käyttövoimalaitoksen nopeuden säätämiseksi ja säätämiseksi, koska moottorin kuormituksessa voi esiintyä suuria muutoksia, jotka voivat vahingoittaa moottoria ja aiheuttaa käyttöiän ja laitteiden menetyksiä. Moottorin kuormituksen vaihtelu voi johtua useista tekijöistä, kuten kovasta merenkäynnistä, aluksen kallistumisesta ja pitchauksesta, aluksen rakenteen heikentymisestä, aluksen painon muutoksista mm.
säätimet on asennettu myös apudieselmoottoreihin tai-generaattoreihin sekä aluksessa oleviin vaihtovirtageneraattoreihin.
aiheeseen liittyvää: Ylinopeusmatka dieselmoottoreissa & Ylinopeusmatkojen tyypit
- Pääjohtimien luokittelu suunnittelun ja rakenteen perusteella
- mekaanisten kuvernöörien edut
- Hydrauliset säätimet
- sähköhydrauliset säätimet
- kansallisten keskuspankkien pääjohtajien toimintaperiaatteiden mukainen luokitus
- hydraulinen ohjaus
- säätimen herkkyys
- elektroninen järjestelmä
- säädin
- mikä on Droop?
- mitä hyötyä kiiturijousesta on?
- mikä on Deadband?
- mitä on metsästys?
Pääjohtimien luokittelu suunnittelun ja rakenteen perusteella
nämä säätimet koostuvat painotetuista kuulista eli lentopainoista, jotka kokevat keskipakoisvoiman, kun moottorin kampiakselin toiminta pyörittää niitä. Tämä keskipakoisvoima toimii ohjaavana voimana ja sitä käytetään moottoriin syötettävän polttoaineen säätelyyn suoraan ruiskutustelineisiin kytketyn kuristusmekanismin kautta. Nämä painokokonaisuudet ovat pieniä, joten syntyvä voima ei riitä suurten moottoreiden ruiskutuspumppujen ohjaamiseen. Niitä voidaan käyttää silloin, kun tarkkaa nopeusvalvontaa ei tarvita. Niissä on suuri deadband ja pieni teho.
aiheeseen liittyvää: alusten polttoöljyn Kulutuslaskelmat: mitä merenkulkijoiden tulisi tietää
mekaanisten kuvernöörien edut
1. Ne ovat halpoja.
2. Niitä voidaan käyttää silloin, kun ei ole tarpeen ylläpitää tarkkaa nopeutta kuormasta riippuen.
3. Ne ovat rakenteeltaan yksinkertaisia ja niissä on vain muutama osa.
Hydrauliset säätimet
hydraulisissa säätimissä painotettu kokoonpano on kytketty säätöventtiiliin eikä suoraan polttoaineen säätötelineisiin, kuten mekaanisessa säätimessä. Tämä venttiili ohjaa hydraulinestettä, joka ohjaa polttoainetelineitä ja siten moottorin tehoa tai nopeutta. Suurempi voima voidaan luoda ja nämä kuvernöörit löytää sovellus keskisuurten ja suurten moottoreiden. Nykyään useimmat alukset käyttävät hydraulisia säätimiä,ja niihin asennetaan elektronisia säätimiä.
hydraulisten säätimien edut ja haitat
1. Niiden teho on suuri,
2. Niillä on suuri tarkkuus ja tarkkuus
3. Niiden hyötysuhde on korkea
4. Hydraulisten säätimien huolto on helppoa
sähköhydrauliset säätimet
tällaisissa säätimissä on toimilaite, jossa on kaksi osaa – mekaaninen hydraulinen vara ja Sähköinen säädin. Sähkösäätimen vikaantuessa laite voi olla manuaaliohjauksessa mekaanis-hydraulisella varasäätimellä. Mekaaninen säädin asetetaan nopeuteen, joka on suurempi kuin nimellinen kierrosnopeus, koko järjestelmän nopeutta ja kuormitusta ohjaa Sähköinen säädin. Järjestelmässä on elektroninen säätöventtiili, joka on kytketty elektromagneettisessa kentässä olevaan armatuuriin.
EKP (Electronic Control Box) lähettää signaalin kentälle, joka asettaa panssarivaunun ja siten polttoaineen syöttöä säätelevän ohjausventtiilin. Sähköinen ohjaus ohittaa mekaanis-hydraulisen tilan, kun järjestelmä on asetettu elektroniseen toimintaan.
aiheeseen liittyvää luettavaa: 10 pointtia, jotka on otettava huomioon käsiteltäessä merimoottorin sähkömekaanista Säätintä
elektronisten säätimien edut
1. Nopeampi vaste kuormituksen muutoksiin
2. Säätöfunktioita voidaan helposti rakentaa säätökeskuksiin
3. Läsnäolo indikaattorit ja valvonta on toteutettu automaatio
4. Ne voidaan asentaa etäällä moottorista sijaitseviin asentoihin, ja ne poistavat tai vähentävät säätölaitteiden tarvetta
kansallisten keskuspankkien pääjohtajien toimintaperiaatteiden mukainen luokitus
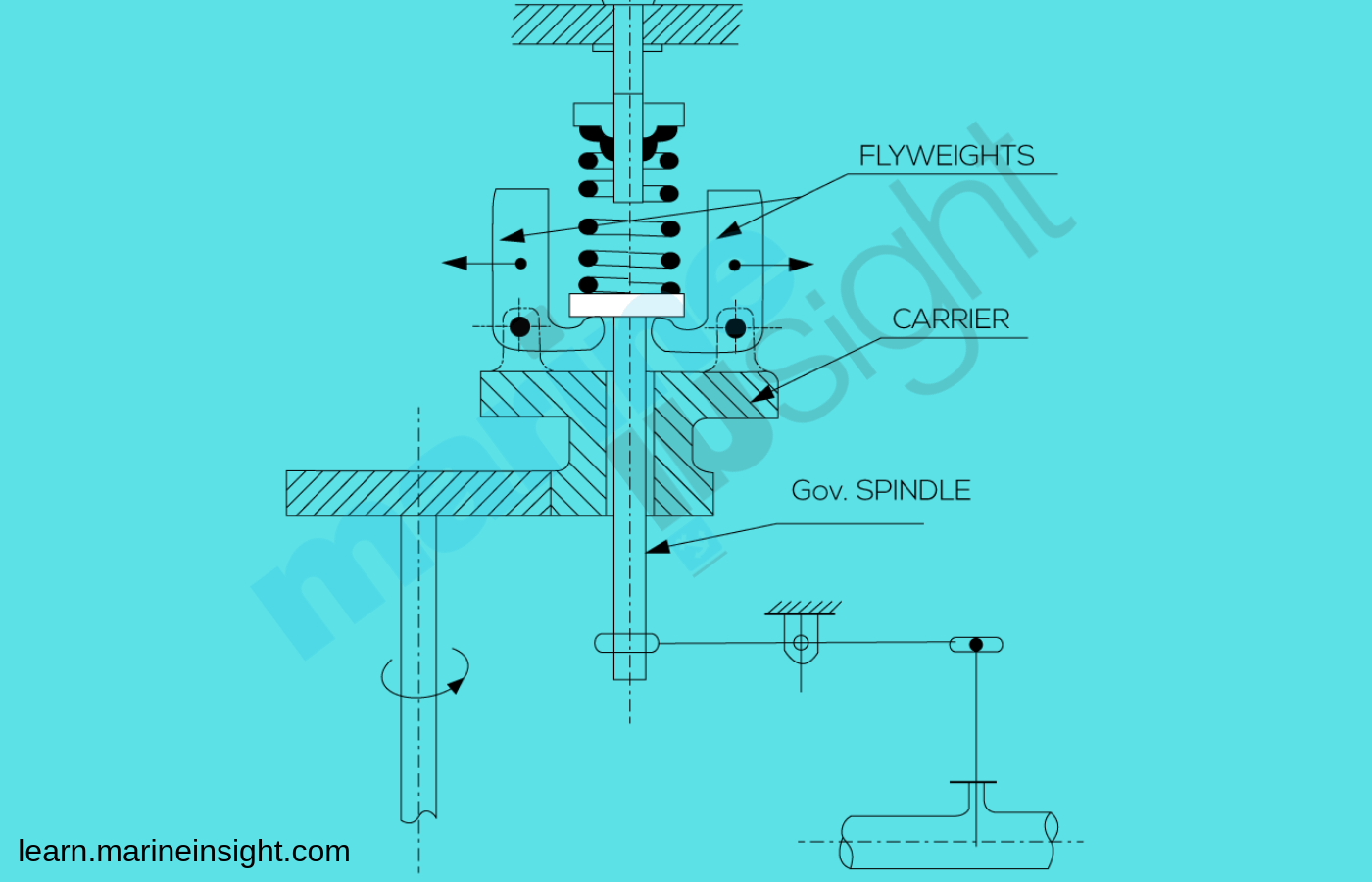
lähes kaikentyyppisissä säätölaitteissa on lentopainoasennelma. Kaksi tai neljä lentopainoa on asennettu pyörivälle pallopäälle, jota moottoriakseli ohjaa suoraan käyttäen vaihteistoasennelmaa. Pallopäiden pyöriminen luo keskipakoisvoiman, joka vaikuttaa kokoonpanon lentopainoihin ja saa ne liikkumaan ulospäin, pois pyörimisakselistaan. Kun pyörimisnopeus kasvaa ja myös lentopainojen ulospäin suuntautuvan liikkeen aste kasvaa, ja päinvastoin ja siten lentopainojen liike riippuu moottorin kierrosnopeudesta.
on asennettu jousi, joka kumoaa lentopainoihin syntyvän keskipakoisvoiman ja pakottaa ne alkuasentoonsa. Tämä kevät tunnetaan kiitäjän keväänä. Lentopainojen asento ja niiden ulospäin suuntautuva liike välittyy värttinään (tämä voi tapahtua kauluksen kautta), joka on vapaa liikkumaan vastavuoroisesti. Tämän karan liike, joka muodostaa ohjausholkin, toimii kytköksenä Polttoainepumpun ohjaukseen ja lopulta ohjaa ruiskutetun polttoaineen määrää.
normaaleissa toimintaolosuhteissa, eli vakionopeudessa ja kuormituksessa, säätöholkki pysyy paikallaan, koska vauhtipainoihin kohdistuva voima on tasapainossa kiiturijousen aiheuttaman vastavoiman kanssa.
moottoriin kohdistuvan kuormituksen kasvaessa moottorin kierrosnopeus pienenee ja ohjausholkki liikkuu alaspäin, sillä kiitäjänjousen siihen kohdistama voima voittaa lentopainojen aiheuttaman voiman.
holkin alaspäin suuntautuva liike liittyy polttoaineen säätötelineisiin siten, että polttoaineen syöttöä ja siten moottorin tuottamaa tehoa lisätään. Voima lentopainoihin kasvaa moottorin kierrosluvun myötä ja järjestelmä palautuu jälleen tasapainoon.
kun moottorin kuormitus vähenee, sen nopeus kasvaa. Flyweights siirtyy ulospäin ja in-turn ohjausholkki liikkuu ylöspäin keskipakoisvoiman voittaessa kiiturin jousivoiman. Holkin liike vaikuttaa polttoainepumppuun, polttoaineen toimitus laskee, jolloin moottorin nopeus vähenee ja järjestelmä tulee tasapainoon.
hydraulinen ohjaus
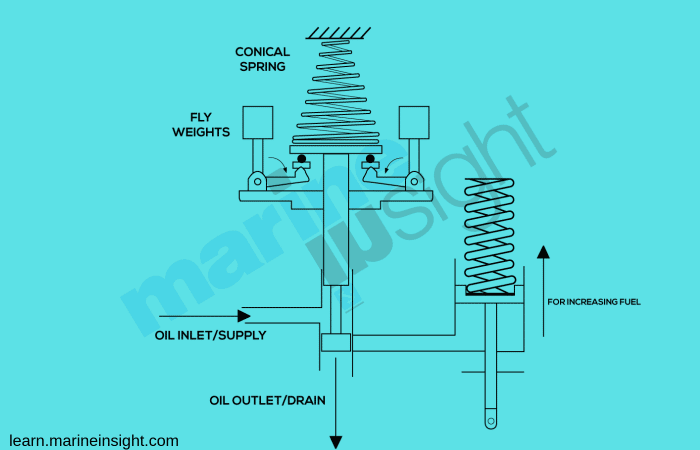
tällöin lentopainot on kytketty hydraulisesti polttoaineen ohjauskokoonpanoon. Järjestelmä koostuu ohjaussäätöventtiilistä, joka on kytketty säätökaraan ja mäntään. Mäntä tunnetaan tehomäntänä ja se ohjaa moottoriin toimitettavan polttoaineen määrää. Siihen vaikuttaa jousen ja vastakkaisilla puolilla olevan hydraulinesteen voima. Järjestelmän öljyn määrää ja myöhemmin männän hydraulista painetta säätelee pilottiventtiili, jota viime kädessä ohjaa flyweight-kokoonpano.
säätöventtiilin holkki on auki pohjassa, jossa säätimen kotelon alaosassa on öljypohja. Hammaspyöräpumppu, joka toimittaa järjestelmään korkeapaineista hydrauliöljyä, ottaa imun öljypohjalta. Sitä ohjaa governor drive shaft. Käytössä on jousikuormitettu akku, joka pitää yllä vaadittua öljynpainepäätä ja mahdollistaa ylimääräisen öljyn valumisen takaisin öljypohjaan.
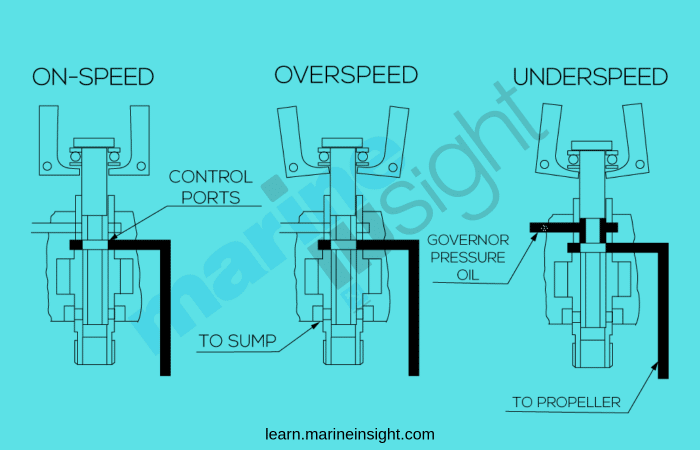
vakionopeus-ja kuormitustoimissa venttiili on sijoitettu estämään venttiilin holkin portit ja siten öljyn pääsyn voimamäntään, joka pysyy paikallaan tasapainovoimien vaikutuksesta.
kuormituksen kasvu laskee moottorin kierrosnopeutta. Tällöin lentopainot liikkuvat sisäänpäin, ja että käskyttäjän Kara liikkuu alaspäin kiitäjän jousen voiman vaikutuksesta. Tämä liike alentaa ohjaussäätöventtiiliä, joka ohjaa öljyä tehomännän alapintaan.
kun männän hydraulinen paine ylittää siihen vaikuttavan jousivoiman, mäntä liikkuu ylöspäin ja polttoaineen syöttö järjestelmämoottoriin lisääntyy. siksi sen nopeus kasvaa. Kun moottorin kierrosluku kasvaa, säätöventtiili nousee takaisin alkuasentoonsa, joka estää hydraulinesteen toimituksen voimamäntään.
toisaalta, kun moottorin kuormitus vähenee ja sen nopeus kasvaa, lentopainojen ulospäin suuntautuva liike ylimääräisen keskipakoisvoiman vaikutuksesta aiheuttaa karan myöhemmän ylöspäin suuntautuvan liikkeen ja siten myös ohjaussäätöventtiili nousee. Tämä avaa portin siten, että järjestelmässä oleva hydrauliöljy virtaa öljypohjaan tehomännän alta salaojakäytävän kautta. Tehomäntä liikkuu sitten alaspäin jousivoiman vaikutuksesta ja vähentää hydraulista painetta ja siten vähentää moottoriin syötettävän polttoaineen määrää. Tämä vähentää moottorin kierroslukua ja näin ollen lentopainojen voimat ovat jälleen tasapainossa.
aiheeseen liittyvää: merimoottoreiden toiminta – käynnistäminen, käynnistäminen, pysäyttäminen
säätimen herkkyys
säätimen herkkyyden lisäämiseksi ja järjestelmän liiallisen korjauksen estämiseksi säätimen rakenteeseen on sisällytetty kompensointimekanismi. Hydraulisessa säätimessä mäntää on voimamännän akselilla ja vetoakselissa. Näitä kutsutaan aktivoivaksi kompensaatiomännäksi ja vastaanottavaksi kompensaatiomännäksi.
kompensoiva mäntä liikkuu sylinterissä, joka on täynnä hydraulinestettä. Tämä mäntä liikkuu samaan suuntaan kuin tehomäntä. Moottorin kierrosnopeuden kasvusta johtuva tehomännän alaspäin suuntautuva liike liikuttaa myös kompensoivaa mäntää alaspäin. Tämän vuoksi mäntä imee öljyä ohjausventtiilin holkin alapuolella olevasta sylinteristä. Tämä luo imun vastaanottavan kompensoivan männän yläpuolelle, joka on osa holkkia. Holkki liikkuu ylöspäin ja sulkee portin virtamäntään.
näin ollen ohjausventtiilin portti avataan juuri sen verran pitkäksi aikaa, että moottorin kierrosnopeus palaa asetusnopeuteen ja ylikorrektointi vältetään. Kun lentopainot ja ohjausventtiili palaavat keskusasentoonsa, neulaventtiilin läpi virtaava öljy mahdollistaa myös ohjausventtiilin holkin pääsyn keskusasentoonsa.
holkin ja männän on laskeuduttava samalla nopeudella, jotta portti pysyy suljettuna, joten neulaventtiili on säädettävä huolellisesti, jotta sen läpi pääsee oikea määrä öljyä. Tämä riippuu valmistajan mukaan Moottorin vaatimuksista. Moottorin kierrosnopeuden laskiessa käynnistävä kompensoiva mäntä liikkuu ylöspäin ja vastaanottavan kompensoivan männän paine kasvaa. Se liikkuu ylös ohjausventtiilin holkin kanssa.
voimasylinteriin johtava portti pysyy kiinni ja ylimääräinen öljy valutetaan ulos neulaventtiilin kautta. Tämän jälkeen holkki palautetaan keskeiselle paikalleen.
elektroninen järjestelmä
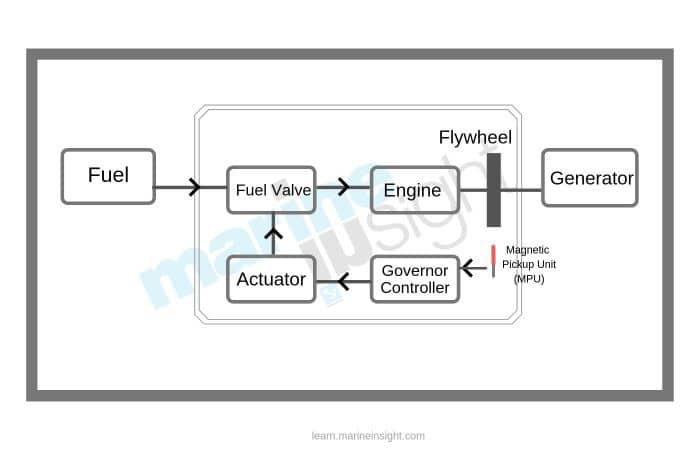
elektroninen säädin säätää moottorin kierrosnopeuden kuormittamattomasta tilasta täyteen kuormaan. Se koostuu ohjaimesta, sähkömagneettisesta pickupista (MPU) ja toimilaitteesta (ACT), jolla suoritetaan tarvittava nopeudensäätö ja säätö. MPU on mikrogeneraattori ja sillä on magneettikenttä. Se koostuu kestomagneetista, jossa on ulkoinen käämitys. Kuten kaaviosta ilmenee, MPU on asennettu Vauhtipyörän hampaiden yläpuolelle ja riippuen sen etäisyydestä hammaspyörän hampaista tai raosta, MPU: n magneettikenttä vaihtelee vastaavasti suurimmasta minimiin.
jatkuvasti muuttuvan sisäisen magneettikentän vuoksi ulompaan johtavaan Kelaan syntyy vaihtovirtajännite ja-taajuus. Tämä vaihtovirtajännite seuraa Vauhtipyörän nopeutta. Tämä on elektronisen ohjausjärjestelmän tärkein näkökohta, sillä säädin-ohjain muuntaa saadun taajuuden TASAJÄNNITESIGNAALIKSI. Sitten se vertaa tätä asetettuun jännitteeseen. Tulokset lasketaan PID-ohjauksella (Proportional-integral-differential) ja lopuksi lähtö saavuttaa toimilaitteen, joka toteuttaa vaaditut korjaukset Moottorin polttoaineensyötössä.
aiheeseen liittyvää: Miten generaattorit synkronoidaan laivalla?
elektronisella ohjaimella on erilaisia toimintatapoja erilaisten toimintojen toteuttamiseksi. Näitä ovat;
1. Havaitsee moottorin käynnistymisen ja ohjaa sen jälkeen polttoaineen syöttöä.
2. Moottorin synnyttämän savun vaimentaminen nopeuden kasvaessa.
3. Säädän roikkumisprosenttia. Alla on esitetty yksityiskohtainen selvitys kaatumisprosentista.
4. Etänopeudensäätö.
5. Joutokäyntinopeuden käyttö: se tarjoaa kiinteän kierrosnopeuden säädön koko Moottorin vääntömomenttikapasiteetista.
6. Suurimman nopeuden säätö: sillä poistetaan Moottorin ylinopeus
säädin
- säädin on pidettävä aina puhtaana ja siinä ei saa olla likaista voiteluöljyä.
- järjestelmä tulee huuhdella säännöllisesti oikealla voiteluöljyllä.
- hydraulinesteen ja voiteluöljyn viskositeetin on oltava valmistajan vaatiman mukainen.
- järjestelmän öljytasot on säilytettävä ja tarkastettava.
- maaherraa ei saa kajota, ja korjaukset ja operaatiot tulee suorittaa vain kokeneilla toimijoilla.
mikä on Droop?
kun moottorin kuormitus kasvaa, polttoaineen syöttö moottoriin kasvaa ja silti se saa kulkea suhteessa pienemmällä nopeudella. Tätä hallintojärjestelmän piirrettä kutsutaan droopiksi. Kun samaan akseliin on kytketty useampi kuin yksi prime mover, kuten sähköenergian tuottamisessa, droop mahdollistaa vakaan kuormituksen jakautumisen niiden välillä.
alkuliikettä voidaan ajaa droop speed control-tilassa, jossa sen ajonopeus määritetään prosentteina todellisesta nopeudesta. Kun generaattorin kuormitus kasvaa kuormittamattomasta täyteen kuormaan, moottorin todellinen nopeus (prime mover) pyrkii laskemaan. Tehon lisäämiseksi tässä moodissa ykkösmoottorinopeuden viitearvoa lisätään ja siten työaineen (polttoaineen) virtausta päätemoottoriin lisätään. Se mitataan prosenttiosuutena kaavasta;
Droop% = (Ei Kuormanopeutta-täyden kuorman nopeus) / ei Kuormanopeutta
mitä hyötyä kiiturijousesta on?
Moottorin hallittu nopeus säädetään muuttamalla nopeuden säätöjousen jännitettä, joka tunnetaan myös kiitäjäjousena. Jousen jännitys kumoaa Vauhtipyörän karaan kohdistaman voiman. Jousen paine määrää moottorin nopeuden, joka on välttämätön, jotta lentopainot säilyttävät keskusasentonsa.
mikä on Deadband?
säätimellä annetaan nopeusalue, jonka jälkeen säädin alkaa toimia korjaavien säätöjen tekemiseksi. Tällä alueella kuvernööri ei toimi lainkaan. Kuolleen nauhan leveys on kääntäen verrannollinen säätimen herkkyyteen.
mitä on metsästys?
moottorin kierrosnopeuden jatkuvaa vaihtelua keskimääräisen vaaditun nopeuden ympärillä kutsutaan metsästykseksi. Tämä tapahtuu, kun säädin on liian herkkä ja muuttaa polttoaineen syöttöä pienelläkin moottorin kierrosluvun muutoksella. Se toimittaa joko liikaa polttoainetta tai liian vähemmän polttoainetta ja säätimen holkki siirtyy toistuvasti korkeimmalle paikalleen. Tämä sykli jatkuu loputtomiin ja Moottorin sanotaan metsästävän.
Vastuuvapauslauseke: Kirjoittajien tässä artikkelissa esittämät näkemykset eivät välttämättä vastaa Marine Insightin näkemyksiä. Artikkelissa mahdollisesti käytetyt tiedot ja kaaviot on hankittu saatavilla olevista tiedoista, eikä mikään lakisääteinen viranomainen ole vahvistanut niitä oikeiksi. Kirjailija ja Marine Insight eivät väitä sitä oikeaksi eivätkä ota vastuuta samasta. Näkemykset ovat vain lausuntoja, eivätkä ne ole suuntaviivoja tai suosituksia mistään toimintatavasta, jota lukijan tulisi noudattaa.
artikkelia tai kuvia ei voi jäljentää, kopioida, jakaa tai käyttää missään muodossa ilman tekijän ja Marine Insightin lupaa.