det er ofte vigtigt i flere applikationer at forhindre en kørende elektrisk motor ret hurtigt. Vi ved, at enhver roterende genstand opnår kinetisk energi (KE). Således, hvor hurtigt vi kan bære objektet til at bryde, afhænger i grunden af, hvor hurtigt vi kan tage sin kinetiske energi ud. Hvis vi slutter at pedalere cyklussen, stopper den i sidste ende efter at have drejet en vis afstand. Den tidlige KE vil blive opbevaret og spredes som varme inden for Stiens modstand. Men for at stoppe cyklen hurtigt, så bremsen påføres. Derfor vil lagret kinetisk energi spredes på to måder, den ene er ved grænsefladen til hjulbremsesko & den anden er ved grænsefladen til vejniveau. Men normal vedligeholdelse af bremsen er nødvendig. Denne artikel diskuterer en oversigt over den dynamiske bremsning af DC-motoren, og den fungerer. Grundlæggende er der tre typer bremsemetoder, der anvendes i en DC-motor som regenerativ, dynamisk og tilslutning.
Hvad er dynamisk bremsning?
Definition: Den dynamiske bremsning er også kendt som reostatisk bremsning. Ved at bruge dette kan momentretningen vendes for at bryde motoren. Når motoren kører tilstand, afbrydes den ved bremsning fra strømkilden & den kan tilsluttes på tværs af en modstand. Når motoren er løsnet fra kilden, begynder rotoren at rotere på grund af inaktivitet & funktioner som en generator. Så når motoren fungerer som en generator, vil strømmen & drejningsmomentet vendes. Under bremsning vil sektionsmodstande blive udskåret for at holde det stabile drejningsmoment.
dynamisk bremsning af DC-Motor
hvis en elektrisk motor simpelthen løsnes fra strømforsyningen, stopper den, men for store motorer vil det tage længere tid på grund af høj roterende inerti, fordi den lagrede energi skal opløses i hele lejet & vindfriktion. Tilstanden kan forbedres ved at skubbe motoren til at fungere som en generator gennem bremsning; et drejningsmoment modsat rotationsvejen vil blive tvunget på akslen, hvilket hjælper enheden med at komme til at afbryde hurtigt. Under hele bremsevirkningen er den tidlige KE, der opbevares i rotoren, enten opløst i en udvendig modstand, der ellers føres tilbage til strømforsyningen.
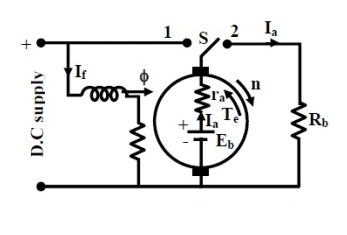
forbindelsesdiagram over dynamisk bremsning af DC-Shuntmotor
i denne form for bremsning løsnes dc-shuntmotoren fra strømforsyningen & en bremsemodstand (Rb) er forbundet over ankeret. Så denne motor fungerer som en generator til at generere bremsemomentet.
gennem denne bremsning, når denne motor fungerer som en generator, så K.E (kinetisk energi) vil lagre inden for de roterende dele af DC-motoren. Den belastning, der er tilsluttet, kan ændres til elektrisk energi. Denne energi vil sprede sig som en varme inden for bremsemodstanden (Rb) & modstanden af ankerkredsløbet (Ra). Denne form for bremsning er en ineffektiv metode til bremsning, fordi den energi, der genereres, vil sprede sig som varme inden for modstandene.
tilslutningsdiagrammet for den dynamiske bremsning af en dc-shuntmotor er vist nedenfor. Fra dette diagram kan bremsemetoden forstås. I det følgende diagram er kontakten ‘ S ‘ en DPDT (dobbeltpolet dobbeltkast).
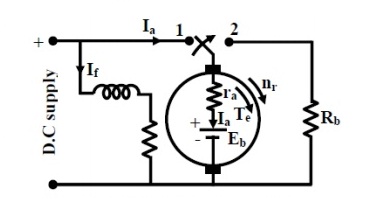
i en fælles motorvejsmetode er kontakten ‘S’ forbundet til to positioner som 1 & 1′. Forsyningsspændingen inklusive polaritet og ekstern modstand (Rb) er forbundet på tværs af 2 & 2′ terminaler. Men i motortilstand forbliver denne kredsløbsdel stationær. For at starte bremsningen kastes kontakten i retning af position 2 & 2′ Ved t = 0, hvorved ankeret løsnes fra tilførslen af venstre hånd. Armaturstrømmen ved t = 0+ vil være Ia = (Eb + V)/(ra + Rb), fordi ‘Eb’ & spændingsforsyningen fra højre hånd har konserveringspolariteter gennem de gode funktioner i forbindelsen.

her kan retningen af ‘Ia’ vendes ved at generere ‘Te’ i omvendt retning mod ‘n’. Når ‘ Eb ‘falder, falder’ Ia ‘ med tiden, mens hastigheden falder. Men ‘Ia’ kan ikke blive til nul på noget tidspunkt på grund af forekomsten af spændingsforsyningen. Så forskellig fra reostatisk vil der eksistere en omfattende størrelse af bremsemoment. Derfor er det sandsynligvis hurtigere at stoppe motoren sammenlignet med reostatisk bremsning. Men hvis kontakten ‘ s ‘konstant inden for positionerne af 1′ & 2’ & selv efter nul hastighed, så maskinen vil begynde optagning hastighed i den modsatte retning til at arbejde som en motor. Så vedligeholdelse skal tages for at løsne forsyningen ved højre hånd, og så bliver ankerhastighedsmomentet nul.
fordele & ulemper
fordelene og ulemperne er
- dette er en meget anvendt metode, hvor en elektrisk motor arbejdes som en generator, når den først er løsnet fra strømkilden
- ved denne bremsning vil den lagrede energi forsvinde gennem bremsemodstanden & andre komponenter, der anvendes i kredsløbet.
- dette vil reducere bremsekomponenter baseret på slid på friktion & regenerering reducerer brugen af nettoenergi.
anvendelser af dynamisk bremsning
applikationerne inkluderer følgende.
- den dynamiske bremseteknik bruges til at stoppe en DC-motor & udbredt i industrielle applikationer.
- disse systemer anvendes til anvendelser af ventilatorer, centrifuger, pumper, hurtig eller kontinuerlig bremsning og visse transportbånd.
- disse bruges, hvor hurtig afmatning & reversering er påkrævet.
- disse bruges på jernbanevogne gennem flere enheder, trolleybusser, elektriske sporvogne, letbanekøretøjer, hybridelektriske & elektriske biler.
Ofte Stillede Spørgsmål
1). Hvad er et alternativt navn på DC dynamisk bremsning
det er også kendt som reostatisk bremsning.
2). Hvad er typerne af bremsning
de er regenerative, dynamiske & plugging.
3). Hvad er DBC (dynamic brake control)?
DBC opbygger straks den største bremsekraft for at stoppe køretøjet.
4). Hvad er forskellen mellem dynamisk & regenerativ bremsning?
den energi, der er lagret i den dynamiske bremsning, vil forsvinde under bremsemodstanden såvel som andre komponenter i kredsløbet, mens den energi, der er lagret, i regenerativ sendes tilbage mod strømkilden, så den kan bruge den igen senere.